Wiki Link
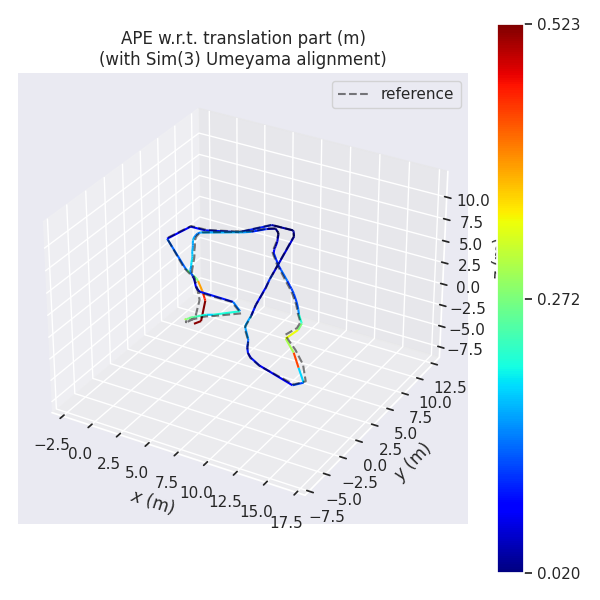
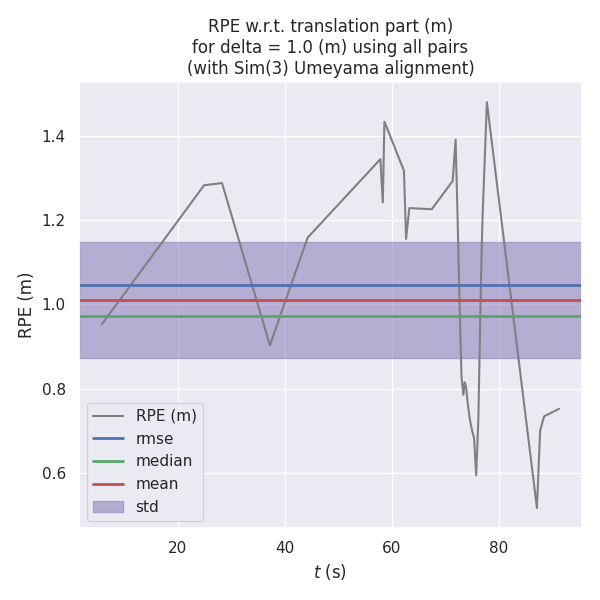
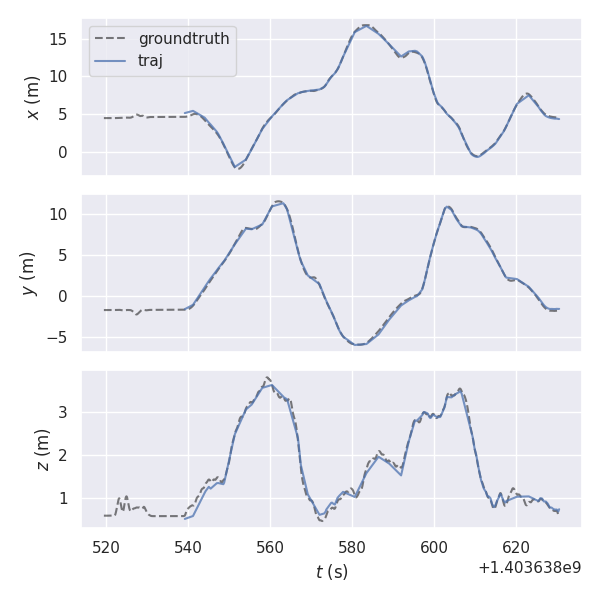
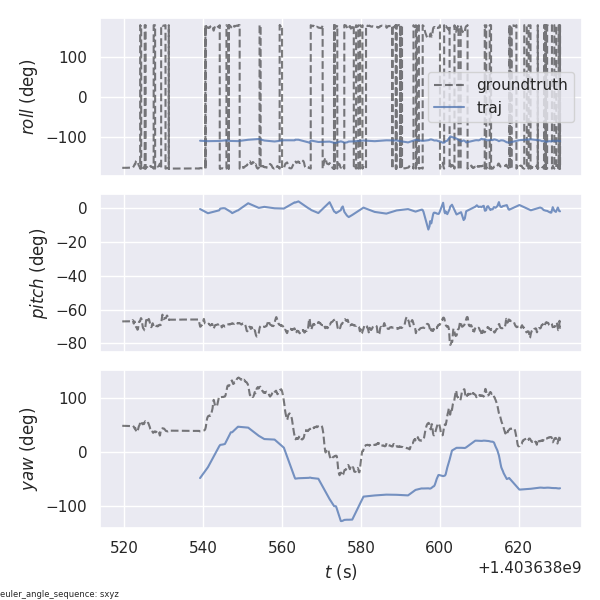
orb-slam3-ros-stereo-inertial with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 20 |
| dataset-parameters | width | 376 |
| dataset-parameters | height | 240 |
| dataset-parameters | fx | 218.32162852 |
| dataset-parameters | fy | 218.32162852 |
| dataset-parameters | cx | 182.34145927 |
| dataset-parameters | cy | 128.59058762 |
| dataset-parameters | k1 | 0.0 |
| dataset-parameters | k2 | 0.0 |
| dataset-parameters | p1 | 0.0 |
| dataset-parameters | p2 | 0.0 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 24.03237374 |
| dataset-parameters | ThDepth | 120.0 |
| dataset-parameters | LEFT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | LEFT_K | [229.327, 0.0, 183.6075, 0.0, 228.648, 124.1875, 0.0, 0.0, 1.0] |
| dataset-parameters | LEFT_R | [0.99996635, -0.00142274, 0.00807958, 0.00136574, 0.99997418, 0.00705563, -0.00808941, -0.00704436, 0.99994247] |
| dataset-parameters | LEFT_P | [218.32162852, 0, 182.34145927, 0, 0, 218.32162852, 128.59058762, 0, 0, 0, 1, 0] |
| dataset-parameters | bFishEye | 0 |
| dataset-parameters | RIGHT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | RIGHT_K | [228.7935, 0.0, 189.9995, 0.0, 228.067, 127.619, 0.0, 0.0, 0.5] |
| dataset-parameters | RIGHT_R | [0.99996335, -0.00362581, 0.00775544, 0.0036804, 0.99996848, -0.00703585, -0.00772969, 0.00706413, 0.99994517] |
| dataset-parameters | RIGHT_P | [218.32162852, 0, 182.34145927, -24.03237374, 0, 218.32162852, 128.59058762, 0, 0, 0, 1, 0] |
| dataset-parameters | NoiseGyro | 0.00017 |
| dataset-parameters | NoiseAcc | 0.002 |
| dataset-parameters | GyroWalk | 1.9393e-05 |
| dataset-parameters | AccWalk | 0.003 |
| dataset-parameters | T_b_c1 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0.0, 0.0, 0.0, 1.0] |
| dataset-parameters | Frequency | 50 |
| algorithm-remap | stereo_left | /camera/left/image_raw |
| algorithm-remap | stereo_right | /camera/right/image_raw |
| algorithm-remap | imu_topic | /imu |
| dataset-remap | /camera/left/image_raw | /cam0/image_raw |
| dataset-remap | /camera/right/image_raw | /cam1/image_raw |
| dataset-remap | /imu | /imu0 |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-frequency | /imu0 | 4 |
| dataset-frequency | /cam1/image_raw | 1 |
| dataset-resolution | /cam0/image_raw | 0.5 |
| dataset-resolution | /cam1/image_raw | 0.5 |
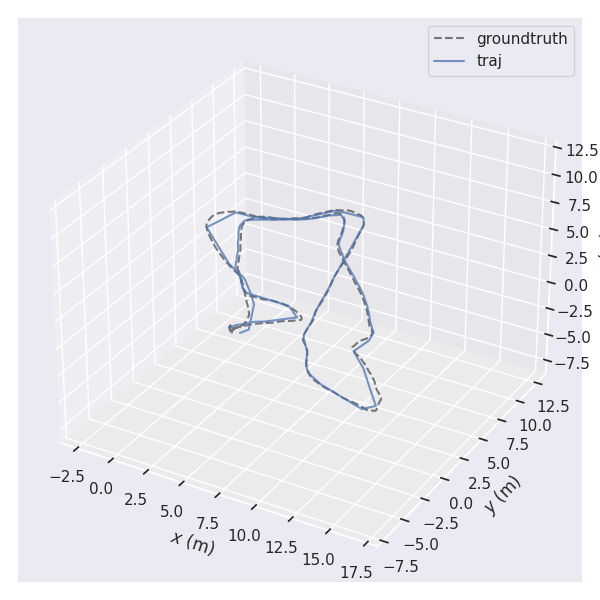
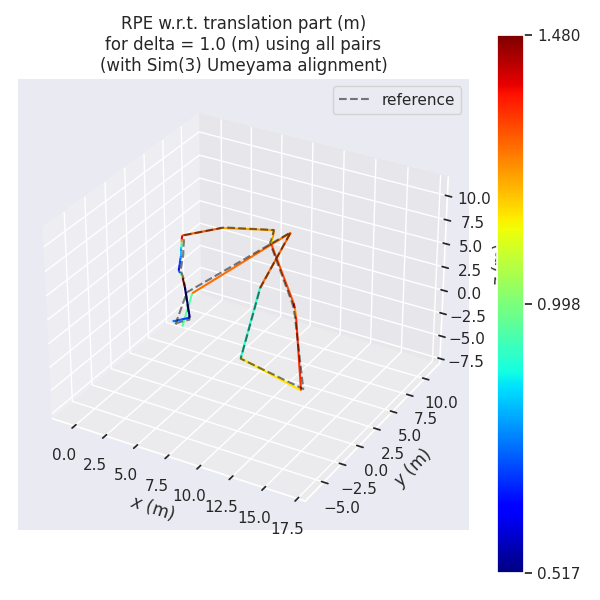
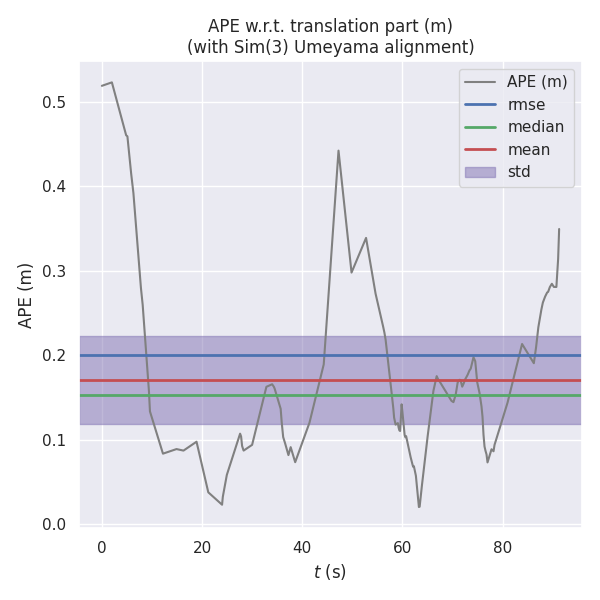
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.19975865609693527 | 0.1708246833910168 | 0.15309671941798297 | 0.10354925509153856 | 0.0202283609056774 | 0.5228541594771303 | 4.549001358164517 |
| RPE | 1.0465563111505565 | 1.0103249671355317 | 0.9726535801459595 | 0.27299006060962605 | 0.5167782357362757 | 1.4796569475963832 | 37.23952382190806 |
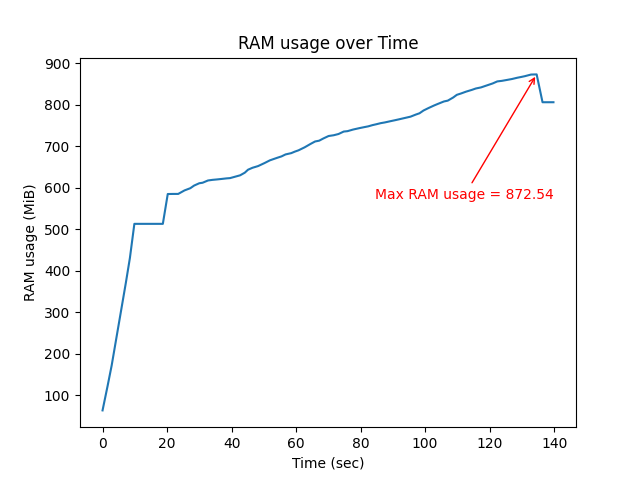
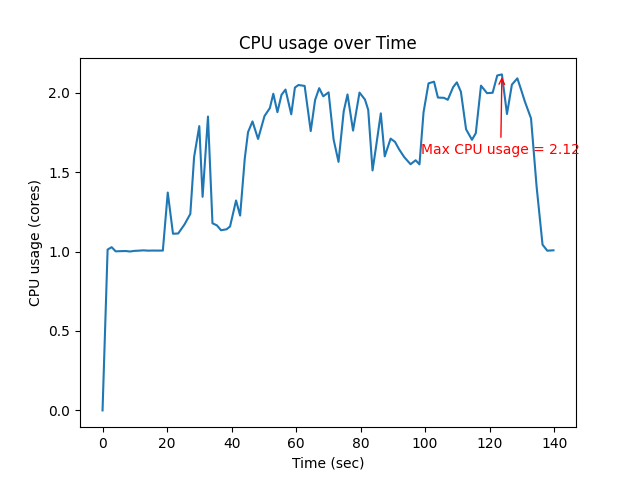
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 2.1156268418649358 | 1.6073585107137391 | 872.54296875 |