Wiki Link
orb-slam3-ros-stereo-inertial with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | imu_acceleration_edge_robust_kernel | Huber |
| dataset-parameters | fps | 20 |
| dataset-parameters | width | 451 |
| dataset-parameters | height | 288 |
| dataset-parameters | fx | 261.91349264 |
| dataset-parameters | fy | 261.91349264 |
| dataset-parameters | cx | 218.81050873 |
| dataset-parameters | cy | 154.26602554 |
| dataset-parameters | k1 | 0.0 |
| dataset-parameters | k2 | 0.0 |
| dataset-parameters | p1 | 0.0 |
| dataset-parameters | p2 | 0.0 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 28.83087208 |
| dataset-parameters | ThDepth | 100.0 |
| dataset-parameters | LEFT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | LEFT_K | [275.1924, 0.0, 220.329, 0.0, 274.3776, 149.025, 0.0, 0.0, 1.0] |
| dataset-parameters | LEFT_R | [0.99996635, -0.00142274, 0.00807958, 0.00136574, 0.99997418, 0.00705563, -0.00808941, -0.00704436, 0.99994247] |
| dataset-parameters | LEFT_P | [261.91349264, 0, 218.81050873, 0, 0, 261.91349264, 154.26602554, 0, 0, 0, 1, 0] |
| dataset-parameters | bFishEye | 0 |
| dataset-parameters | RIGHT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | RIGHT_K | [274.5522, 0.0, 227.9994, 0.0, 273.6804, 153.1428, 0.0, 0.0, 1.0] |
| dataset-parameters | RIGHT_R | [0.999997256, 0.00231206719, 0.000376008102, -0.00231713572, 0.999898049, 0.0140898358, -0.000343393121, -0.0140906685, 0.999900663] |
| dataset-parameters | RIGHT_P | [218.32162852, 0, 182.34145927, -24.03237374, 0, 218.32162852, 128.59058762, 0, 0, 0, 1, 0] |
| dataset-parameters | NoiseGyro | 0.00017 |
| dataset-parameters | NoiseAcc | 0.002 |
| dataset-parameters | GyroWalk | 1.9393e-05 |
| dataset-parameters | AccWalk | 0.003 |
| dataset-parameters | T_b_c1 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0.0, 0.0, 0.0, 1.0] |
| dataset-parameters | Frequency | 200 |
| algorithm-remap | stereo_left | /camera/left/image_raw |
| algorithm-remap | stereo_right | /camera/right/image_raw |
| algorithm-remap | imu_topic | /imu |
| dataset-remap | /camera/left/image_raw | /cam0/image_raw |
| dataset-remap | /camera/right/image_raw | /cam1/image_raw |
| dataset-remap | /imu | /imu0 |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-frequency | /imu0 | 1 |
| dataset-frequency | /cam1/image_raw | 1 |
| dataset-resolution | /cam0/image_raw | 0.6 |
| dataset-resolution | /cam1/image_raw | 0.8 |
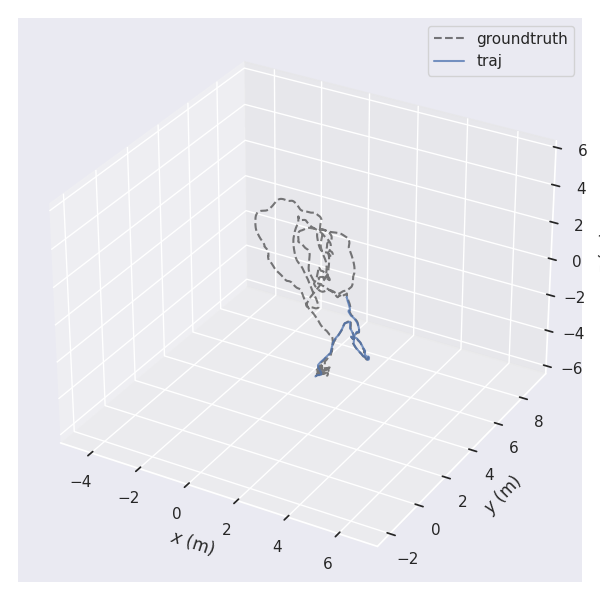
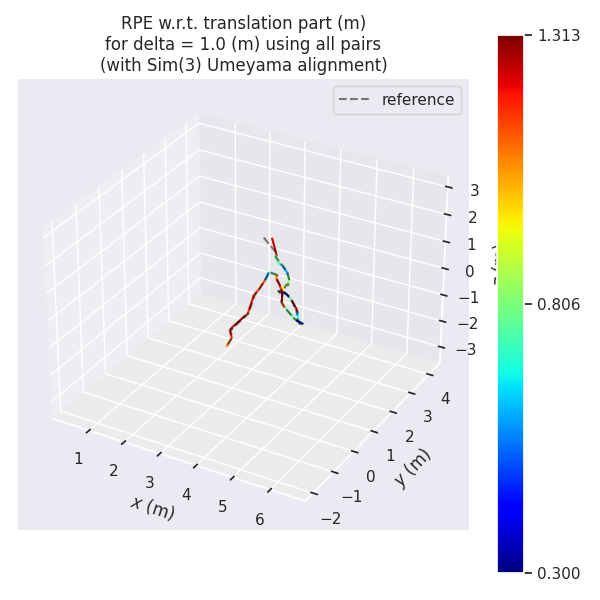
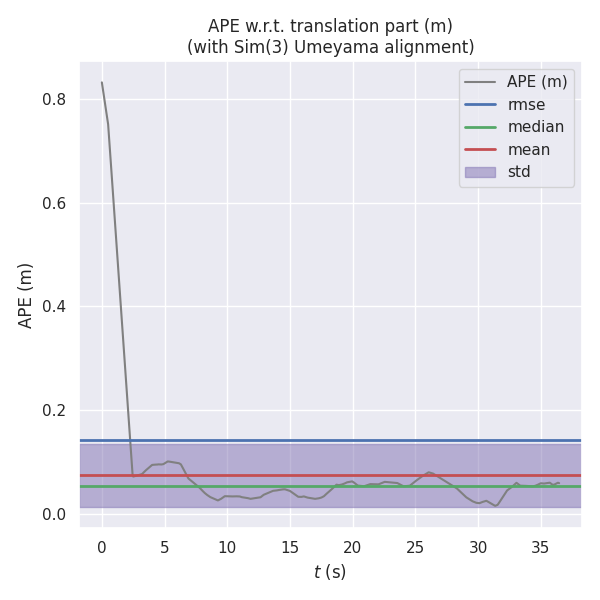
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
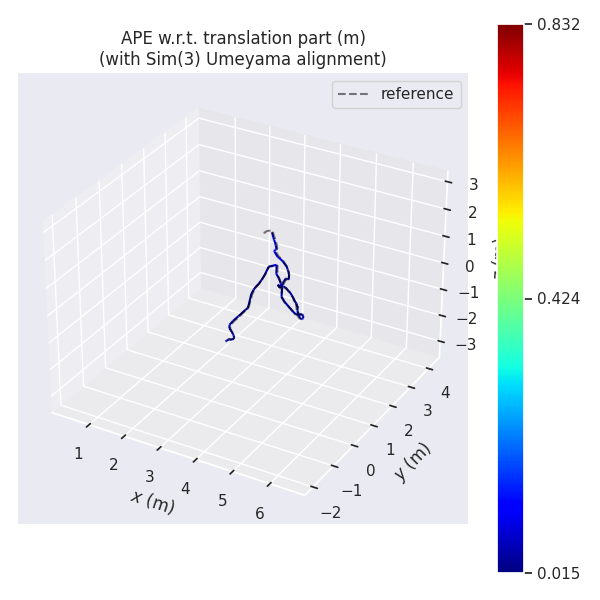
| ATE | 0.14251458578030377 | 0.07370827293407481 | 0.05355716334793116 | 0.12197334815937251 | 0.014953055002976435 | 0.8321042894340723 | 2.0107303088530246 |
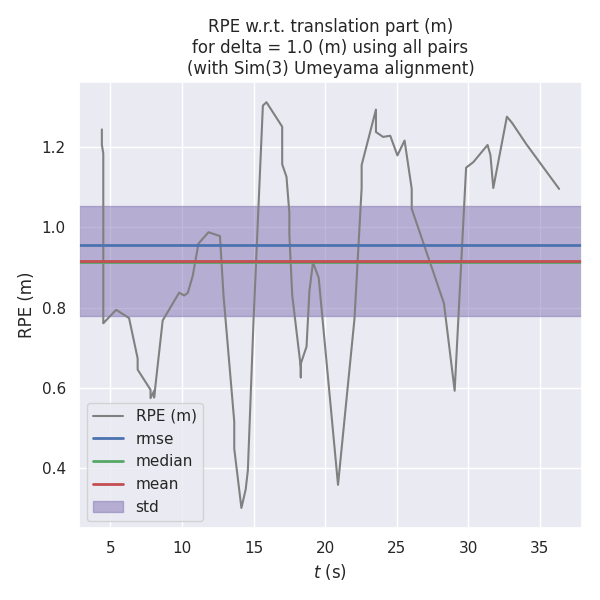
| RPE | 0.9574148020647996 | 0.9169091748719492 | 0.9129026559982976 | 0.2755370542203363 | 0.300229615353024 | 1.3125549595542862 | 61.41508791525622 |
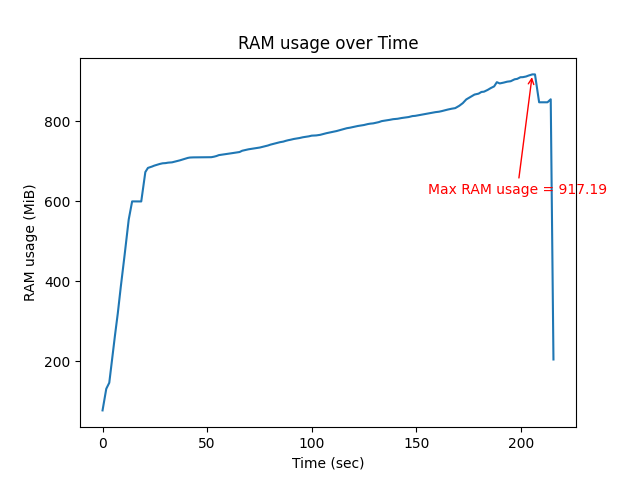
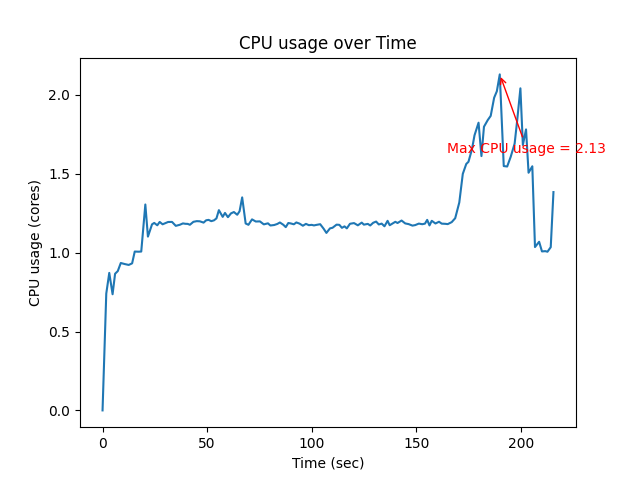
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 2.1303079108330545 | 1.2397683805673563 | 917.19140625 |