Wiki Link

orb-slam3-ros-stereo-inertial with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1500 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 10 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | fx | 348.163756777 |
| dataset-parameters | fy | 348.163756777 |
| dataset-parameters | cx | 293.961376953 |
| dataset-parameters | cy | 201.760681152 |
| dataset-parameters | k1 | 0.0 |
| dataset-parameters | k2 | 0.0 |
| dataset-parameters | p1 | 0.0 |
| dataset-parameters | p2 | 0.0 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 47.90639384423901 |
| dataset-parameters | ThDepth | 35.0 |
| dataset-parameters | LEFT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | LEFT_K | [366.9232, 0.0, 293.772, 0.0, 365.8368, 198.7, 0.0, 0.0, 1.0] |
| dataset-parameters | LEFT_R | [0.999966347530033, -0.001422739138722922, 0.008079580483432283, 0.001365741834644127, 0.9999741760894847, 0.007055629199258132, -0.008089410156878961, -0.007044357138835809, 0.9999424675829176] |
| dataset-parameters | LEFT_P | [348.163756777, 0, 293.961376953, 0, 0, 348.163756777, 201.760681152, 0, 0, 0, 1, 0] |
| dataset-parameters | bFishEye | 0 |
| dataset-parameters | RIGHT_D | [-0.28368365, 0.07451284, -0.00010473, -3.555907e-05, 0.0] |
| dataset-parameters | RIGHT_K | [366.9232, 0.0, 293.772, 0.0, 365.8368, 198.7, 0.0, 0.0, 1.0] |
| dataset-parameters | RIGHT_R | [0.999966347530033, -0.001422739138722922, 0.008079580483432283, 0.001365741834644127, 0.9999741760894847, 0.007055629199258132, -0.008089410156878961, -0.007044357138835809, 0.9999424675829176] |
| dataset-parameters | RIGHT_P | [348.163756777, 0, 293.961376953, -47.90639384423901, 0, 348.163756777, 201.760681152, 0, 0, 0, 1, 0] |
| dataset-parameters | NoiseGyro | 0.00017 |
| dataset-parameters | NoiseAcc | 0.002 |
| dataset-parameters | GyroWalk | 1.9393e-05 |
| dataset-parameters | AccWalk | 0.003 |
| dataset-parameters | T_b_c1 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0.0, 0.0, 0.0, 1.0] |
| dataset-parameters | Frequency | 100 |
| algorithm-remap | stereo_left | /camera/left/image_raw |
| algorithm-remap | stereo_right | /camera/right/image_raw |
| algorithm-remap | imu_topic | /imu |
| dataset-remap | /camera/left/image_raw | /cam0/image_raw |
| dataset-remap | /camera/right/image_raw | /cam1/image_raw |
| dataset-remap | /imu | /imu0 |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-frequency | /imu0 | 2 |
| dataset-frequency | /cam1/image_raw | 2 |
| dataset-resolution | /cam0/image_raw | 0.8 |
| dataset-resolution | /cam1/image_raw | 0.8 |
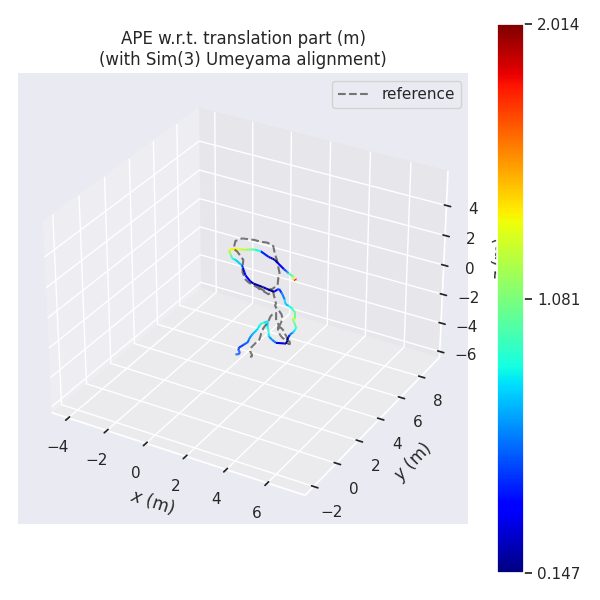
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
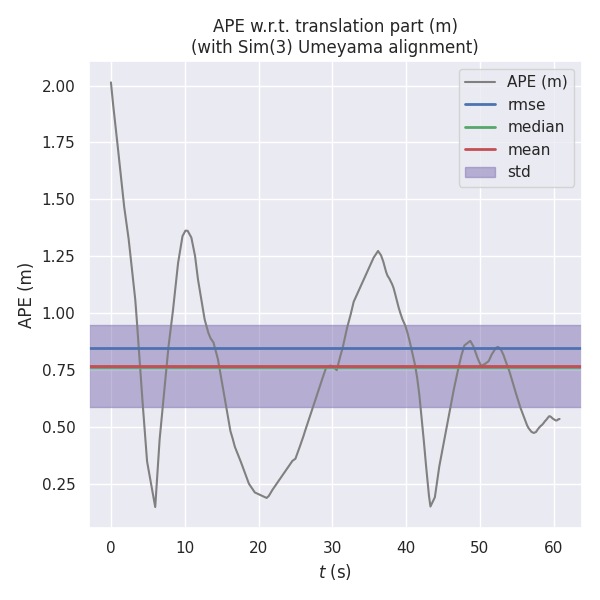
| ATE | 0.8460835516854224 | 0.7668607655847628 | 0.761879263439762 | 0.35746600207484125 | 0.14687605343440702 | 2.014167668639801 | 101.65174745343185 |
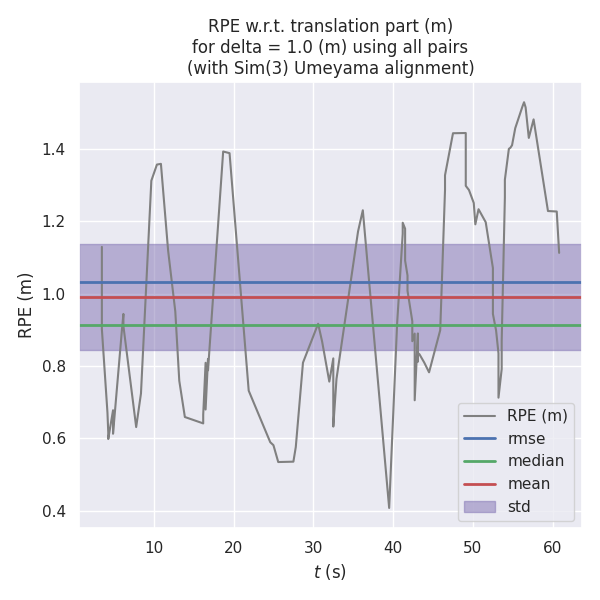
| RPE | 1.0337834386083447 | 0.9916895794415584 | 0.9140080509533635 | 0.29199310945280654 | 0.40771020625256066 | 1.5298227265975988 | 100.45857060644397 |
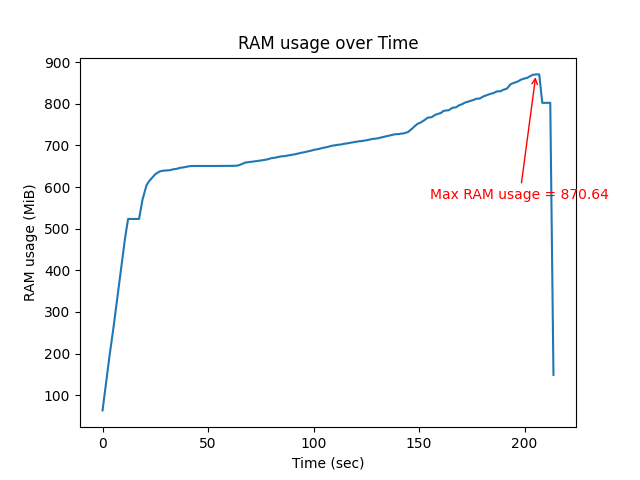
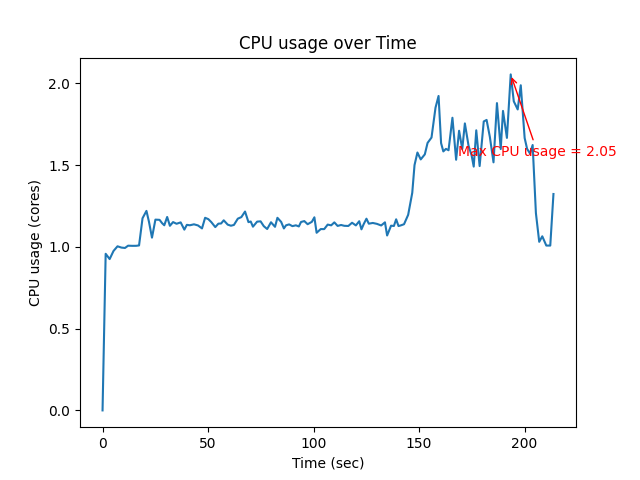
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 2.0540367150517502 | 1.2693475309067204 | 870.64453125 |