Wiki Link
orb-slam3-ros-stereo-inertial with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 10 |
| dataset-parameters | width | 752 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 435.2046959714599 |
| dataset-parameters | fy | 435.2046959714599 |
| dataset-parameters | cx | 367.4517211914062 |
| dataset-parameters | cy | 252.2008514404297 |
| dataset-parameters | k1 | 0.0 |
| dataset-parameters | k2 | 0.0 |
| dataset-parameters | p1 | 0.0 |
| dataset-parameters | p2 | 0.0 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 47.90639384423901 |
| dataset-parameters | ThDepth | 35.0 |
| dataset-parameters | LEFT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | LEFT_K | [458.654, 0.0, 367.215, 0.0, 457.296, 248.375, 0.0, 0.0, 1.0] |
| dataset-parameters | LEFT_R | [0.999966347530033, -0.001422739138722922, 0.008079580483432283, 0.001365741834644127, 0.9999741760894847, 0.007055629199258132, -0.008089410156878961, -0.007044357138835809, 0.9999424675829176] |
| dataset-parameters | LEFT_P | [435.2046959714599, 0, 367.4517211914062, 0, 0, 435.2046959714599, 252.2008514404297, 0, 0, 0, 1, 0] |
| dataset-parameters | bFishEye | 0 |
| dataset-parameters | RIGHT_D | [-0.28368365, 0.07451284, -0.00010473, -3.555907e-05, 0.0] |
| dataset-parameters | RIGHT_K | [457.587, 0.0, 379.999, 0.0, 456.134, 255.238, 0.0, 0.0, 1] |
| dataset-parameters | RIGHT_R | [0.9999633526194376, -0.003625811871560086, 0.007755443660172947, 0.003680398547259526, 0.9999684752771629, -0.007035845251224894, -0.007729688520722713, 0.007064130529506649, 0.999945173484644] |
| dataset-parameters | RIGHT_P | [435.2046959714599, 0, 367.4517211914062, -47.90639384423901, 0, 435.2046959714599, 252.2008514404297, 0, 0, 0, 1, 0] |
| dataset-parameters | NoiseGyro | 0.00017 |
| dataset-parameters | NoiseAcc | 0.002 |
| dataset-parameters | GyroWalk | 1.9393e-05 |
| dataset-parameters | AccWalk | 0.003 |
| dataset-parameters | T_b_c1 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0.0, 0.0, 0.0, 1.0] |
| dataset-parameters | Frequency | 100 |
| algorithm-remap | stereo_left | /camera/left/image_raw |
| algorithm-remap | stereo_right | /camera/right/image_raw |
| algorithm-remap | imu_topic | /imu |
| dataset-remap | /camera/left/image_raw | /cam0/image_raw |
| dataset-remap | /camera/right/image_raw | /cam1/image_raw |
| dataset-remap | /imu | /imu0 |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-frequency | /imu0 | 2 |
| dataset-frequency | /cam1/image_raw | 2 |
| dataset-resolution | /cam0/image_raw | 1.0 |
| dataset-resolution | /cam1/image_raw | 1.0 |
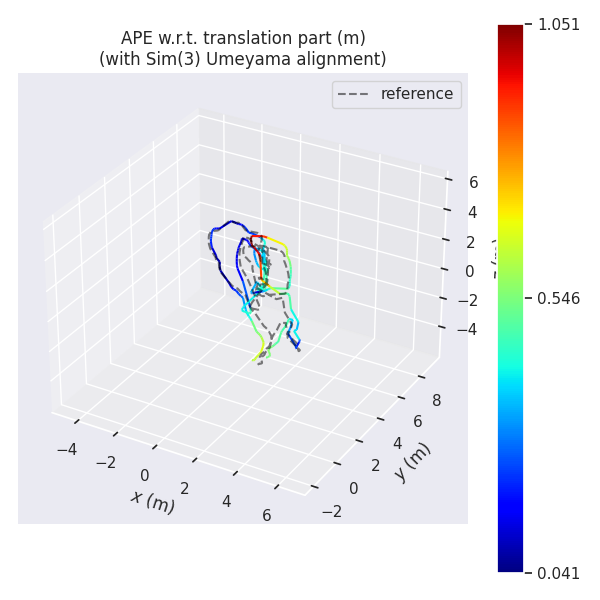
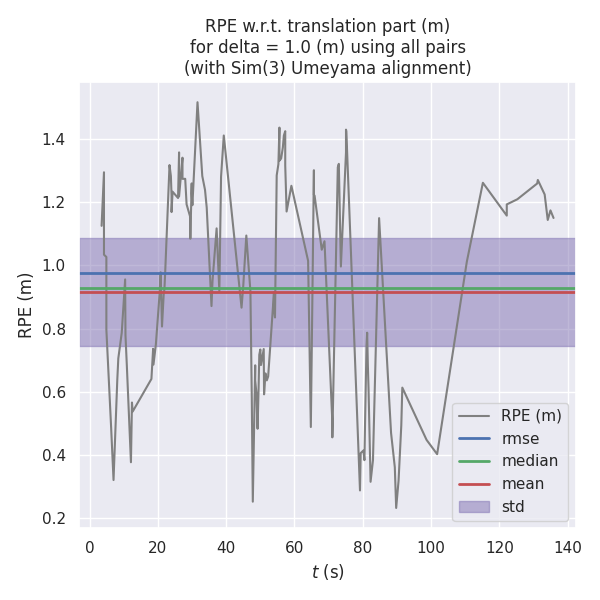
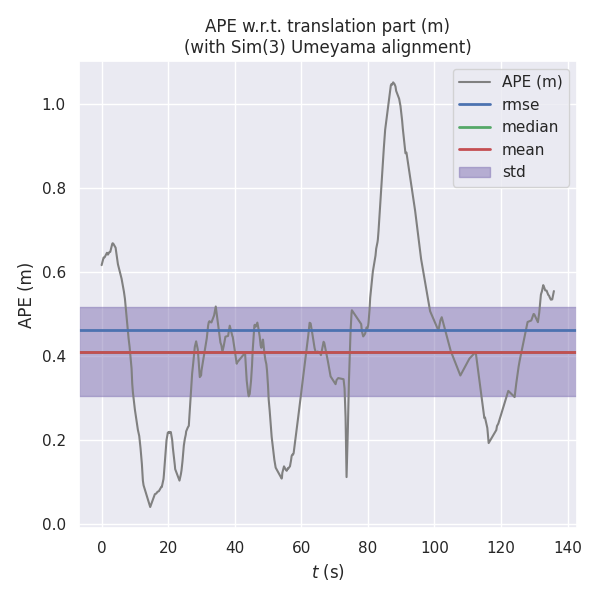
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
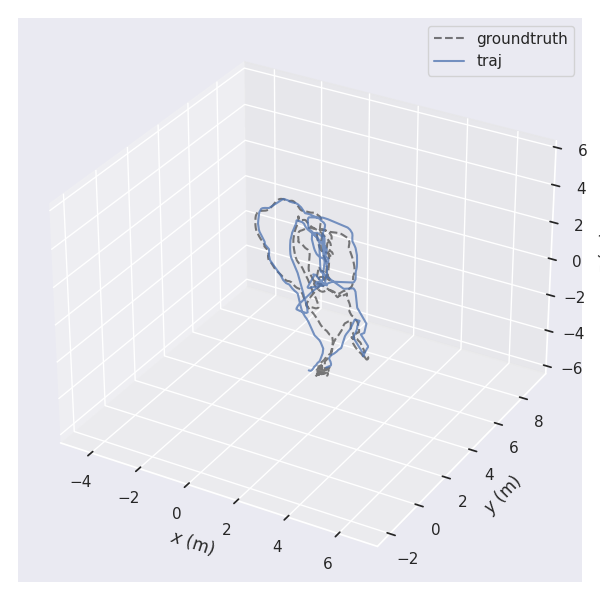
| ATE | 0.46272709988395677 | 0.4109477664543504 | 0.4101062492721279 | 0.21269297640777407 | 0.04102021451760952 | 1.0512023721549375 | 56.09848866935853 |
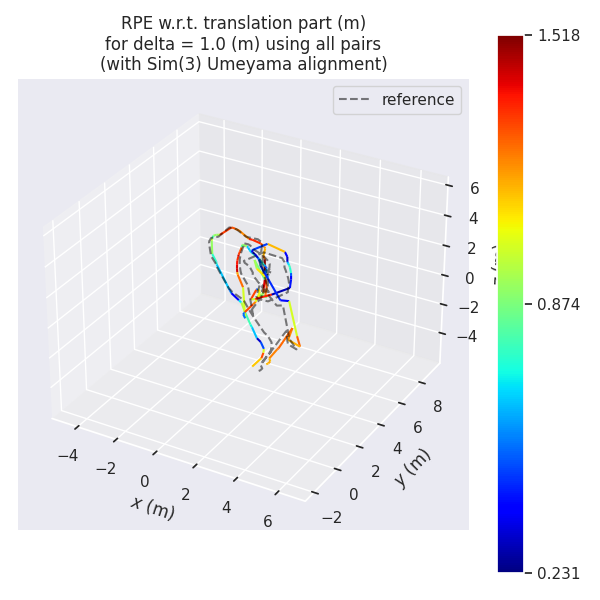
| RPE | 0.9772041977988317 | 0.9152714528479352 | 0.9292549404598613 | 0.342353927679073 | 0.230798494087037 | 1.5179527078369726 | 133.68992618739213 |
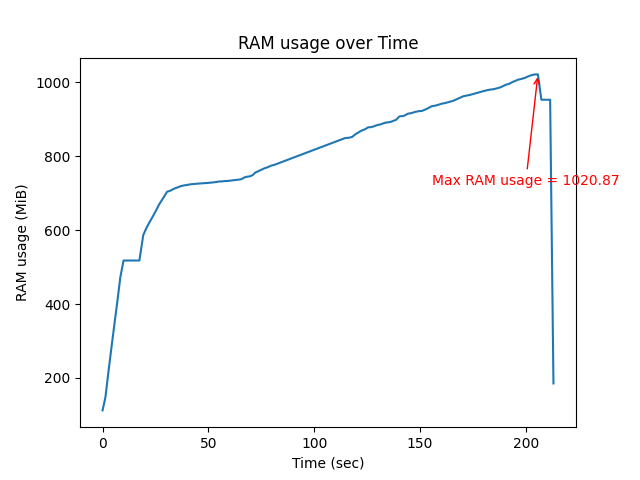
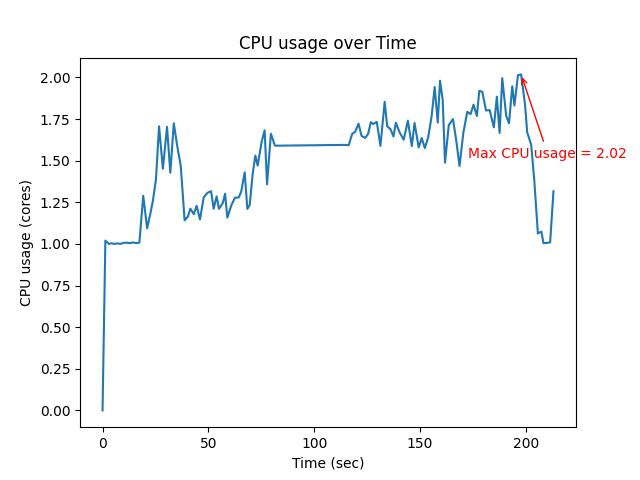
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 2.0182968735668108 | 1.4795168494731985 | 1020.87109375 |