Wiki Link
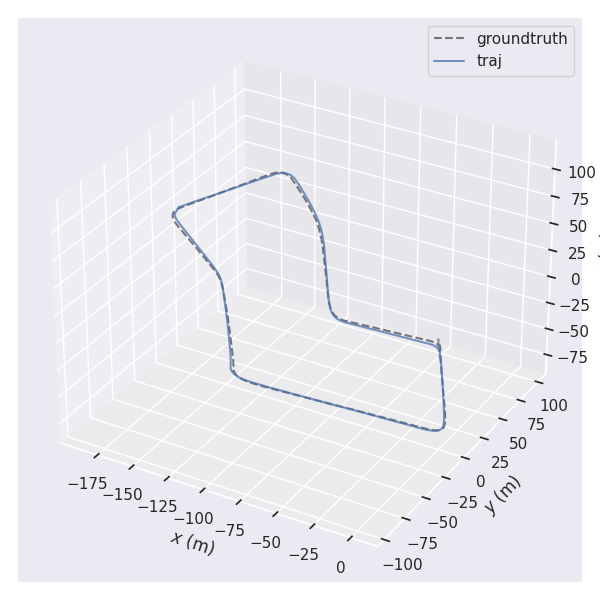
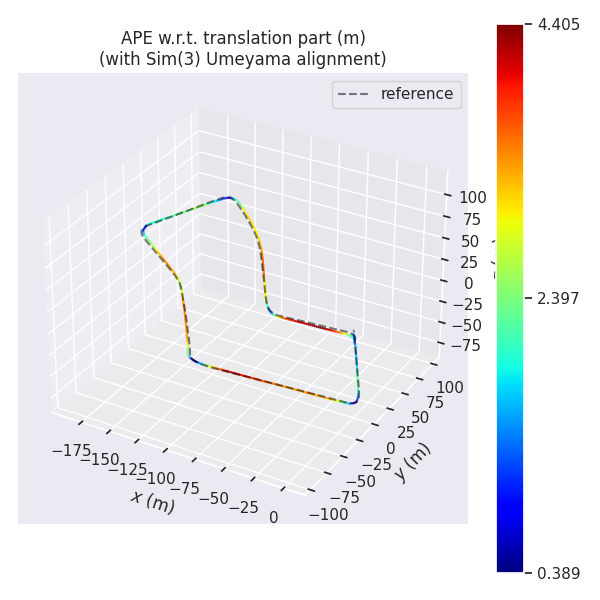
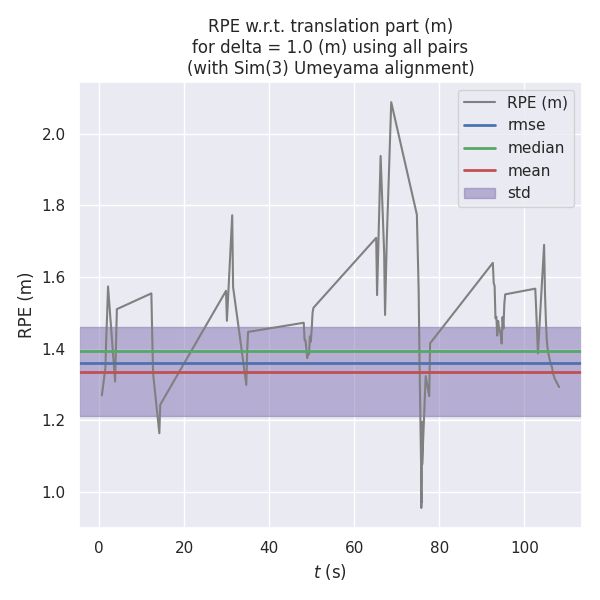
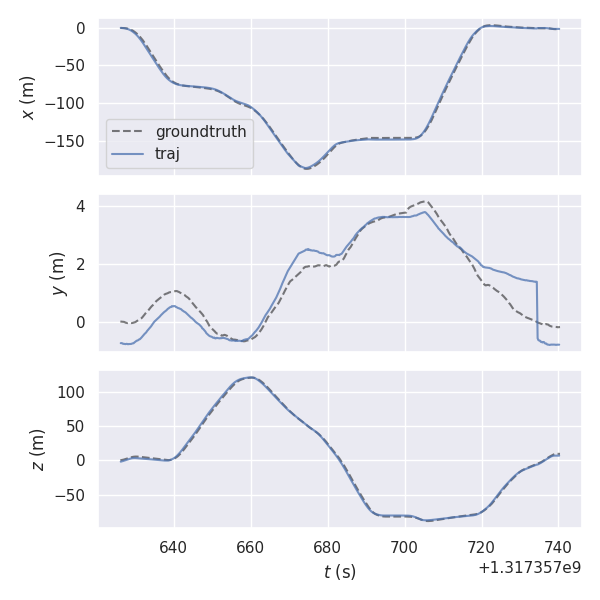
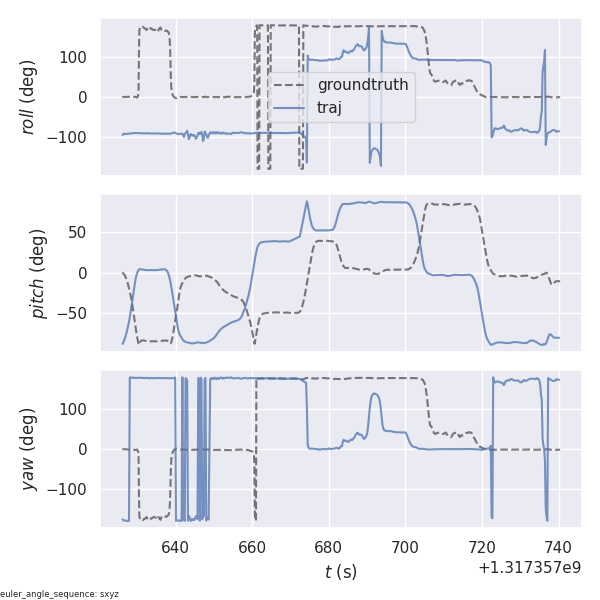
lio-sam with kitti_2011_09_30_drive_0027_synced_full
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | edgeThreshold | 1.0 |
| algorithm-parameters | surfThreshold | 0.1 |
| algorithm-parameters | edgeFeatureMinValidNum | 10 |
| algorithm-parameters | surfFeatureMinValidNum | 100 |
| algorithm-parameters | odometrySurfLeafSize | 0.4 |
| algorithm-parameters | mappingCornerLeafSize | 0.2 |
| algorithm-parameters | mappingSurfLeafSize | 0.4 |
| algorithm-parameters | z_tollerance | 1000 |
| algorithm-parameters | rotation_tollerance | 1000 |
| algorithm-parameters | numberOfCores | 4 |
| algorithm-parameters | mappingProcessInterval | 0.15 |
| algorithm-parameters | surroundingkeyframeAddingDistThreshold | 1.0 |
| algorithm-parameters | surroundingkeyframeAddingAngleThreshold | 0.2 |
| algorithm-parameters | surroundingKeyframeDensity | 2.0 |
| algorithm-parameters | surroundingKeyframeSearchRadius | 50.0 |
| algorithm-parameters | loopClosureFrequency | 1.0 |
| algorithm-parameters | surroundingKeyframeSize | 50 |
| algorithm-parameters | historyKeyframeSearchRadius | 15.0 |
| algorithm-parameters | historyKeyframeSearchTimeDiff | 30.0 |
| algorithm-parameters | historyKeyframeSearchNum | 25 |
| algorithm-parameters | historyKeyframeFitnessScore | 0.3 |
| algorithm-parameters | gpsCovThreshold | 2.0 |
| algorithm-parameters | poseCovThreshold | 25.0 |
| algorithm-parameters | downsampleRate | 2 |
| algorithm-parameters | pointCloudTopic | points_raw |
| algorithm-parameters | imuTopic | imu_raw |
| algorithm-parameters | savePCD | False |
| algorithm-parameters | savePCDDirectory | /Downloads/LOAM/ |
| algorithm-parameters | loopClosureEnableFlag | True |
| algorithm-parameters | navsatfrequency | 50 |
| algorithm-parameters | navsatwait_for_datum | False |
| algorithm-parameters | navsatdelay | 0.0 |
| algorithm-parameters | navsatmagnetic_declination_radians | 0 |
| algorithm-parameters | navsatyaw_offset | 0 |
| algorithm-parameters | navsatzero_altitude | True |
| algorithm-parameters | navsatbroadcast_utm_transform | False |
| algorithm-parameters | navsatbroadcast_utm_transform_as_parent_frame | False |
| algorithm-parameters | navsatpublish_filtered_gps | False |
| algorithm-parameters | ekf_gpspublish_tf | False |
| algorithm-parameters | ekf_gpsfrequency | 50 |
| algorithm-parameters | ekf_gpstwo_d_mode | False |
| algorithm-parameters | ekf_gpssensor_timeout | 0.01 |
| algorithm-parameters | GpsElevation | False |
| algorithm-parameters | gpsTopic | odometry/gpsz |
| dataset-parameters | imuGyrNoise | 0.0015636343949698187 |
| dataset-parameters | imuAccNoise | 0.003993957088823881 |
| dataset-parameters | imuGyrBiasN | 3.564031869636761e-05 |
| dataset-parameters | imuAccBiasN | 6.435665935353257e-05 |
| dataset-parameters | imuGravity | 9.80511 |
| dataset-parameters | sensor | velodyne |
| dataset-parameters | N_SCAN | 64 |
| dataset-parameters | Horizon_SCAN | 1800 |
| dataset-parameters | lidarMinRange | 1.0 |
| dataset-parameters | lidarMaxRange | 1000.0 |
| dataset-parameters | imuRPYWeight | 0.01 |
| dataset-parameters | extrinsicTrans | [-0.8086759, 0.3195559, -0.7997231] |
| dataset-parameters | extrinsicRPY | [0.9999976, 0.0007553071, -0.002035826, -0.0007854027, 0.9998898, -0.01482298, 0.002024406, 0.01482454, 0.9998881] |
| dataset-parameters | extrinsicRot | [0.9999976, 0.0007553071, -0.002035826, -0.0007854027, 0.9998898, -0.01482298, 0.002024406, 0.01482454, 0.9998881] |
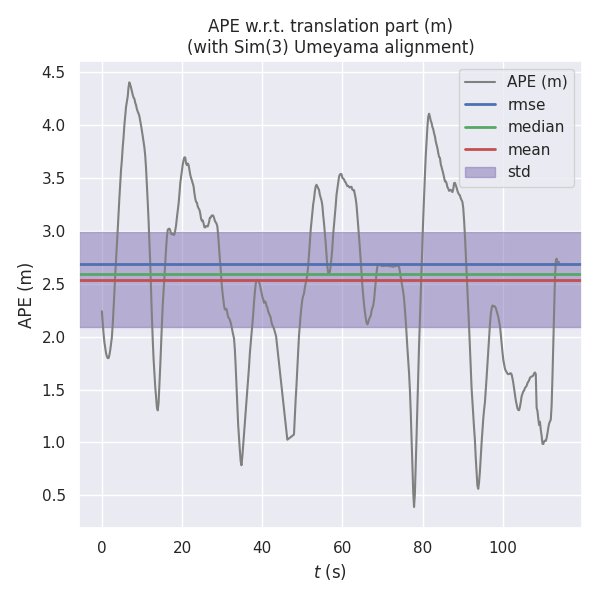
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 2.6907813271245327 | 2.536479904509497 | 2.59525636489858 | 0.8980945631844997 | 0.389210623397161 | 4.405097466031177 | 3786.6790706602787 |
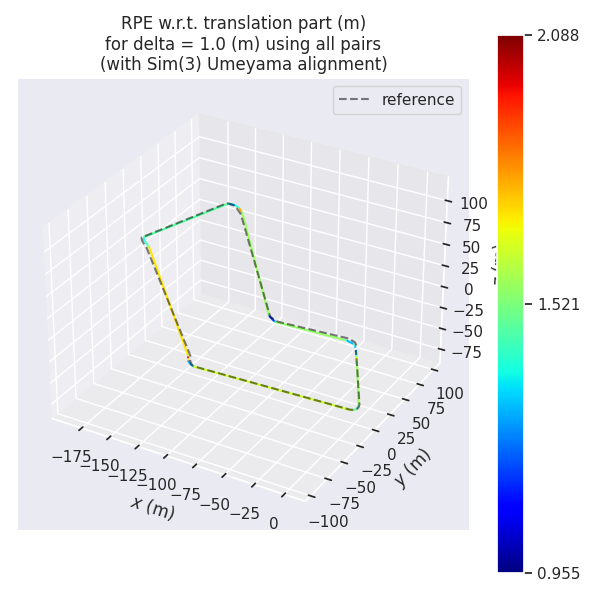
| RPE | 1.358814750846346 | 1.33607687750615 | 1.3933200457667225 | 0.24754010687368241 | 0.9551850354554213 | 2.087716934405872 | 201.25515045582026 |
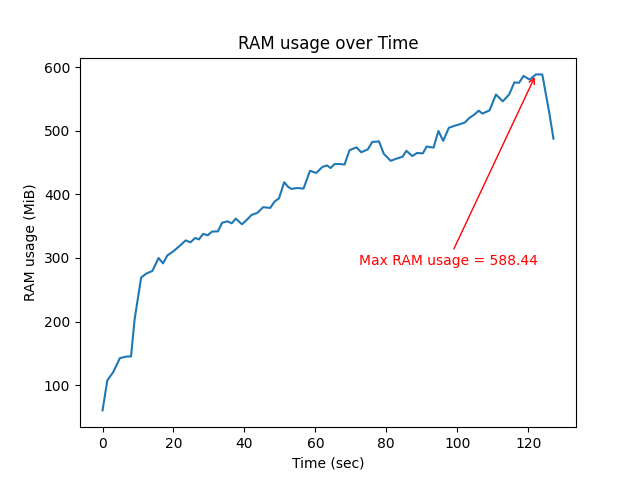
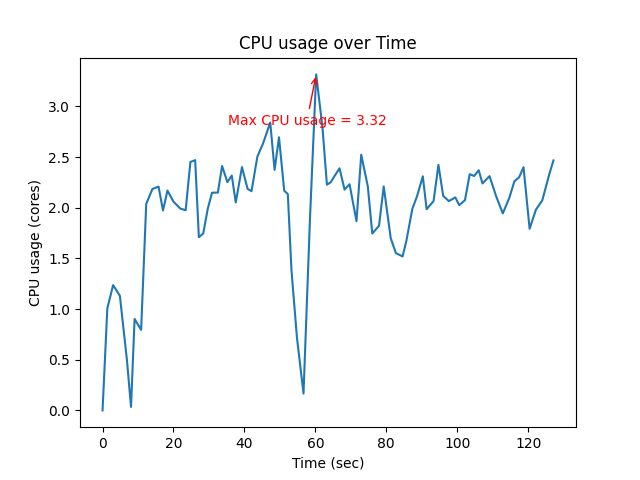
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 3.3163937117231397 | 1.992103905478148 | 588.4375 |