Wiki Link
orb-slam3-ros-rgbd with rgbd_dataset_freiburg2_desk
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 30 |
| dataset-parameters | width | 640 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 520.90862 |
| dataset-parameters | fy | 521.007327 |
| dataset-parameters | cx | 325.141442 |
| dataset-parameters | cy | 249.701764 |
| dataset-parameters | k1 | 0.231222 |
| dataset-parameters | k2 | -0.784899 |
| dataset-parameters | p1 | -0.003257 |
| dataset-parameters | p2 | -0.000105 |
| dataset-parameters | k3 | 0.917205 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | ThDepth | 40.0 |
| dataset-parameters | DepthMapFactor | 1.0 |
| dataset-parameters | baseline | 0.07732 |
| algorithm-remap | rgb_topic | /slamhive/camera/rgb |
| algorithm-remap | dep_topic | /slamhive/camera/depth |
| dataset-remap | /slamhive/camera/rgb | /camera/rgb/image_color |
| dataset-remap | /slamhive/camera/depth | /camera/depth/image |
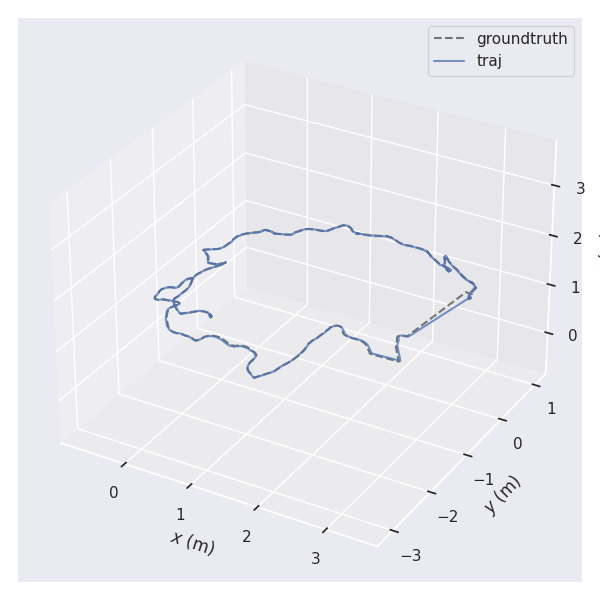
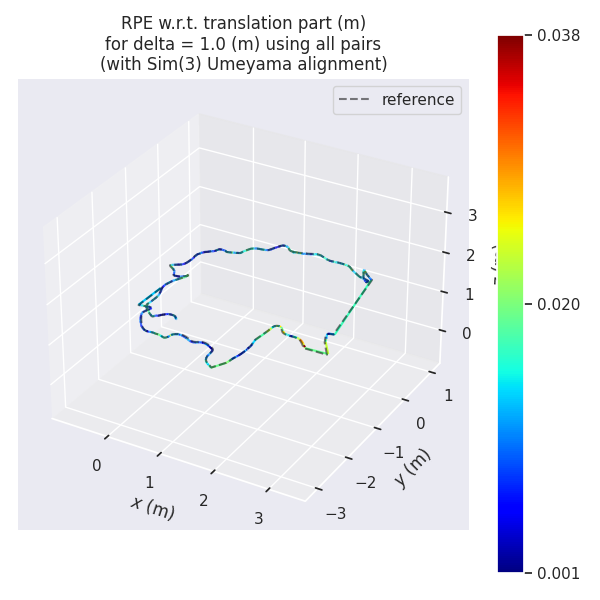
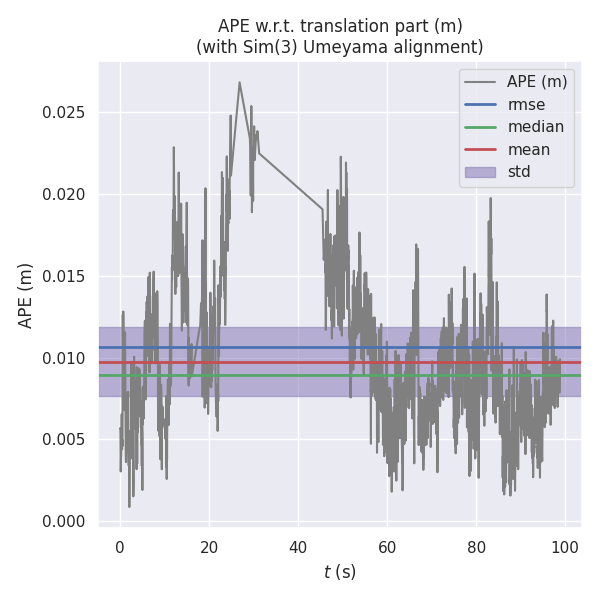
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
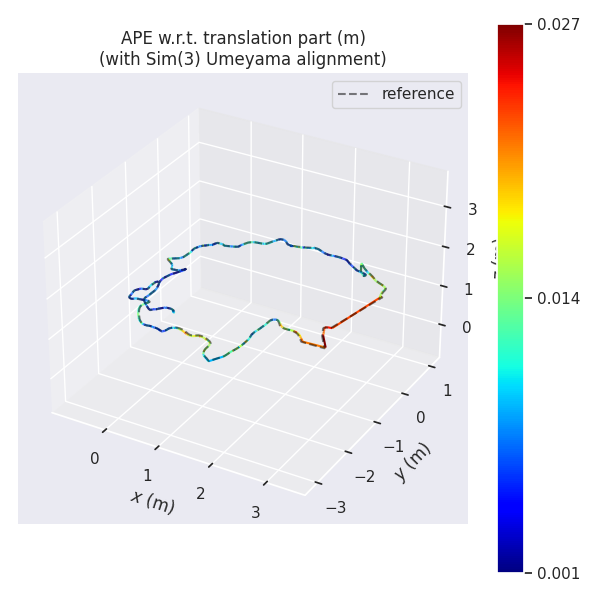
| ATE | 0.010614504455367553 | 0.009735110240892034 | 0.008912518298609642 | 0.004230287629783189 | 0.0008742649435835634 | 0.026793290797628242 | 0.24505225801181335 |
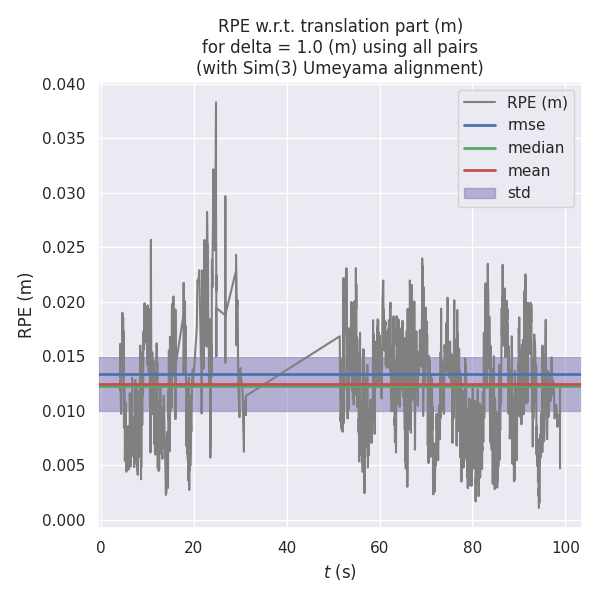
| RPE | 0.013360198610703656 | 0.012421118350237445 | 0.012234371241427323 | 0.004920439598942613 | 0.0010805713837246111 | 0.038285645780002445 | 0.3446736652575919 |
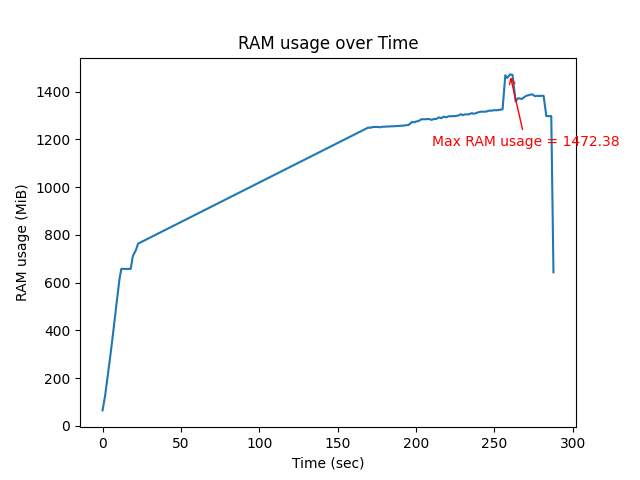
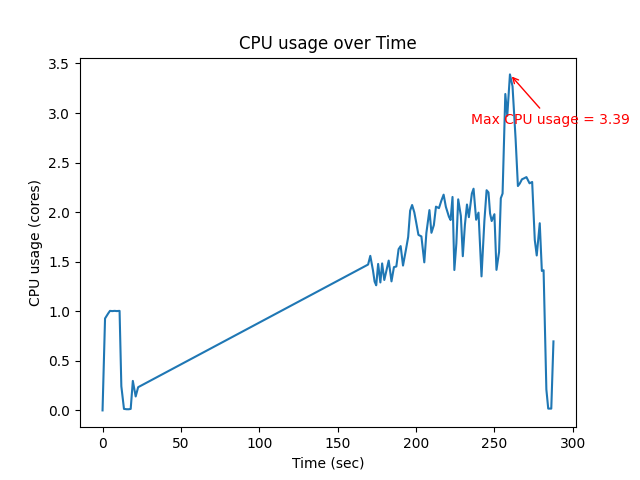
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 3.389624883077579 | 1.6043247271345538 | 1472.375 |