Wiki Link
orb-slam3-ros-stereo-inertial with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 20 |
| dataset-parameters | width | 752 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 436.24429564 |
| dataset-parameters | fy | 436.24429564 |
| dataset-parameters | cx | 364.44123459 |
| dataset-parameters | cy | 256.95167542 |
| dataset-parameters | k1 | 0.0 |
| dataset-parameters | k2 | 0.0 |
| dataset-parameters | p1 | 0.0 |
| dataset-parameters | p2 | 0.0 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 48.02083068 |
| dataset-parameters | ThDepth | 60.0 |
| dataset-parameters | LEFT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | LEFT_K | [458.654, 0.0, 367.215, 0.0, 457.296, 248.375, 0.0, 0.0, 1.0] |
| dataset-parameters | LEFT_R | [0.99996635, -0.00142274, 0.00807958, 0.00136574, 0.99997418, 0.00705563, -0.00808941, -0.00704436, 0.99994247] |
| dataset-parameters | LEFT_P | [436.24429564, 0.0, 364.44123459, 0.0, 0.0, 436.24429564, 256.95167542, 0.0, 0.0, 0.0, 1.0, 0.0] |
| dataset-parameters | bFishEye | 0 |
| dataset-parameters | RIGHT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | RIGHT_K | [457.587, 0.0, 379.999, 0.0, 456.134, 255.238, 0.0, 0.0, 1] |
| dataset-parameters | RIGHT_R | [0.99996335, -0.00362581, 0.00775544, 0.0036804, 0.99996848, -0.00703585, -0.00772969, 0.00706413, 0.99994517] |
| dataset-parameters | RIGHT_P | [436.24429564, 0.0, 364.44123459, -48.02083068, 0.0, 436.24429564, 256.95167542, 0.0, 0.0, 0.0, 1.0, 0.0] |
| dataset-parameters | NoiseGyro | 0.00017 |
| dataset-parameters | NoiseAcc | 0.002 |
| dataset-parameters | GyroWalk | 1.9393e-05 |
| dataset-parameters | AccWalk | 0.003 |
| dataset-parameters | T_b_c1 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0.0, 0.0, 0.0, 1.0] |
| dataset-parameters | Frequency | 200 |
| algorithm-remap | stereo_left | /camera/left/image_raw |
| algorithm-remap | stereo_right | /camera/right/image_raw |
| algorithm-remap | imu_topic | /imu |
| dataset-remap | /camera/left/image_raw | /cam0/image_raw |
| dataset-remap | /camera/right/image_raw | /cam1/image_raw |
| dataset-remap | /imu | /imu0 |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-frequency | /imu0 | 1 |
| dataset-frequency | /cam1/image_raw | 1 |
| dataset-resolution | /cam0/image_raw | 1.0 |
| dataset-resolution | /cam1/image_raw | 1.0 |
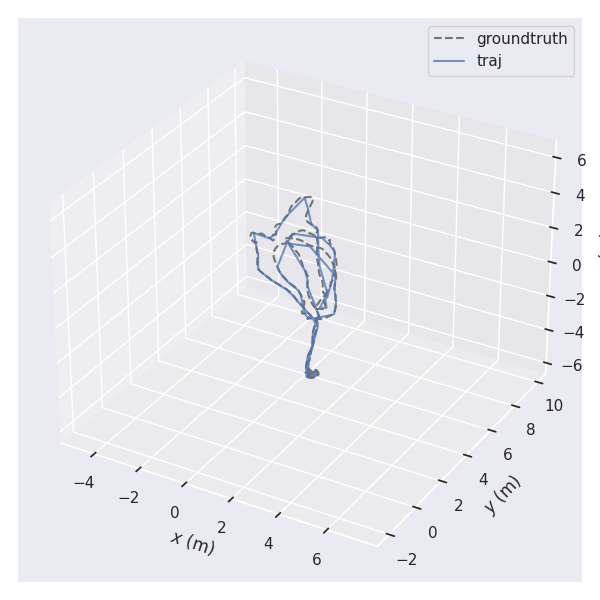
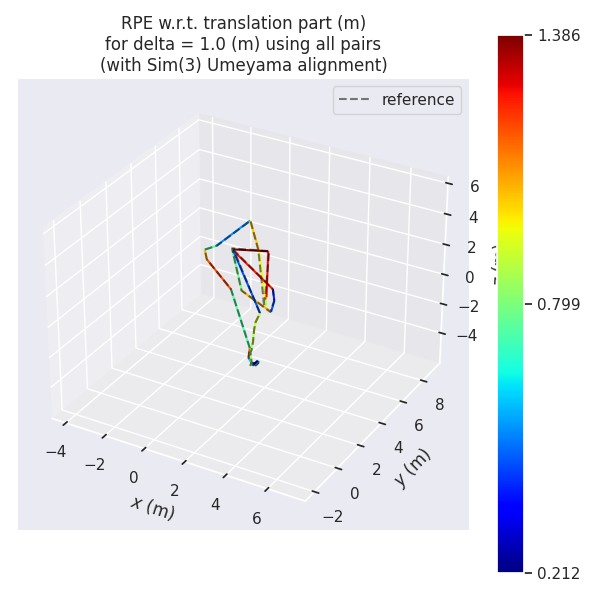
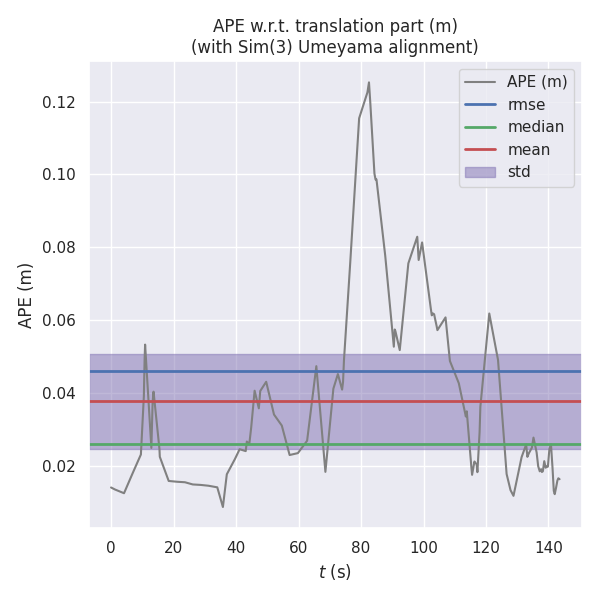
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
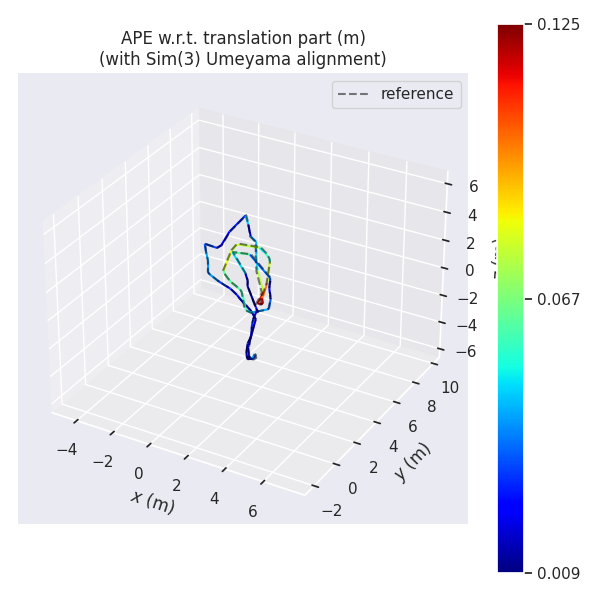
| ATE | 0.04589222320093861 | 0.03774069272060507 | 0.02590829850240387 | 0.02611007972591495 | 0.008658269457091519 | 0.12528906504448725 | 0.24009496113702355 |
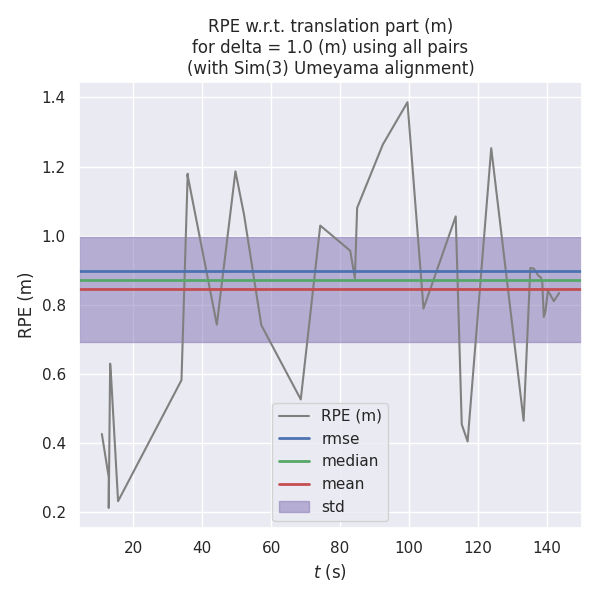
| RPE | 0.8969250964018084 | 0.8443646537871103 | 0.8713016813804186 | 0.3025276185579867 | 0.2118949481384171 | 1.3863064570659318 | 32.17898514221573 |
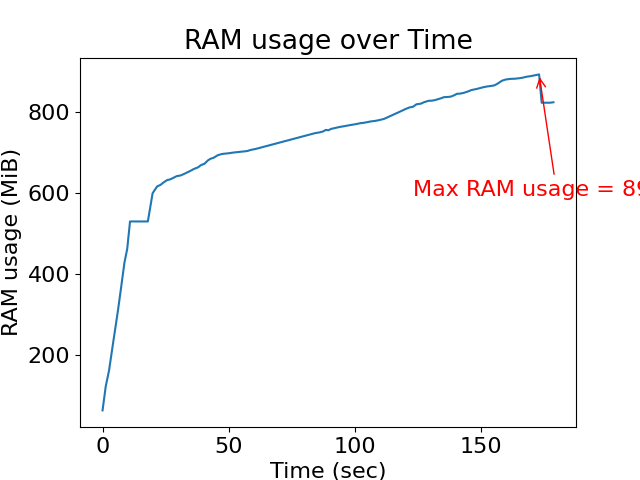
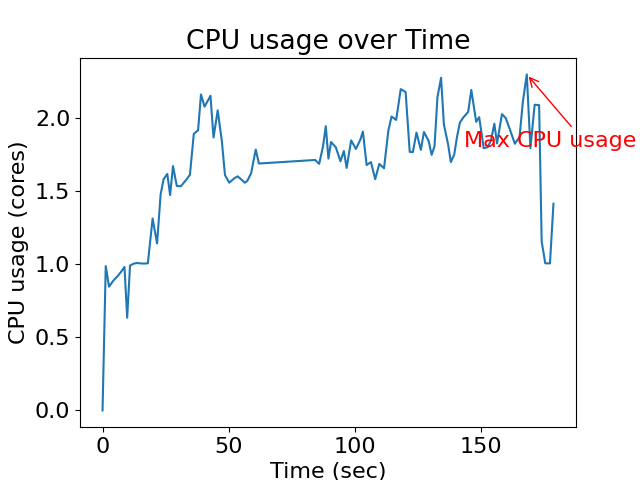
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 2.3007641309449807 | 1.6744027263090357 | 893.75390625 |