Wiki Link
orb-slam2-ros-rgbd with rgbd_dataset_freiburg2_desk
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 2250 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 30.0 |
| dataset-parameters | width | 640 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 520.90862 |
| dataset-parameters | fy | 521.007327 |
| dataset-parameters | cx | 325.141442 |
| dataset-parameters | cy | 249.701764 |
| dataset-parameters | k1 | 0.231222 |
| dataset-parameters | k2 | -0.784899 |
| dataset-parameters | p1 | -0.003257 |
| dataset-parameters | p2 | -0.000105 |
| dataset-parameters | k3 | 0.917205 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 40.0 |
| dataset-parameters | ThDepth | 40.0 |
| dataset-parameters | DepthMapFactor | 1.0 |
| algorithm-remap | rgb_topic | /slamhive/camera/rgb |
| algorithm-remap | dep_topic | /slamhive/camera/depth |
| dataset-remap | /slamhive/camera/rgb | /camera/rgb/image_color |
| dataset-remap | /slamhive/camera/depth | /camera/depth/image |
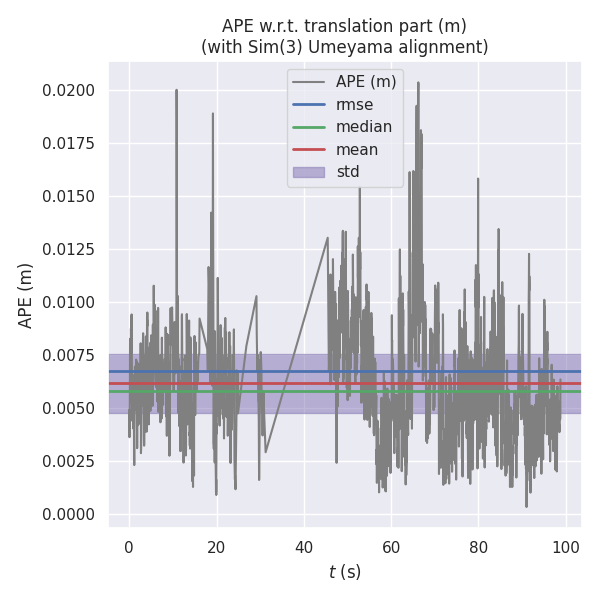
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
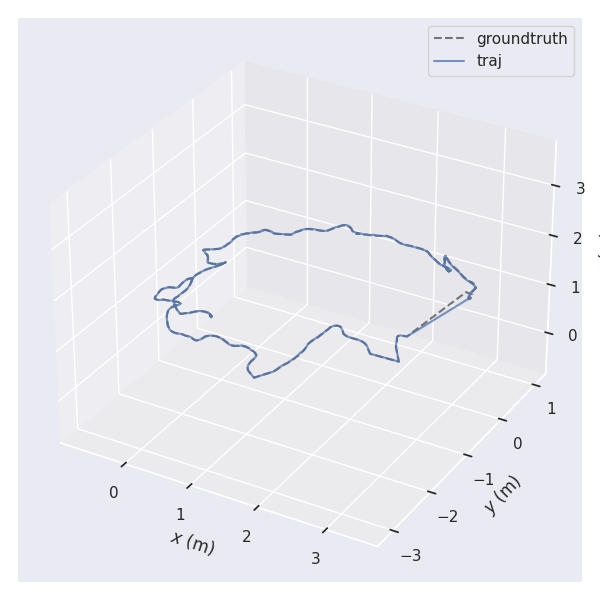
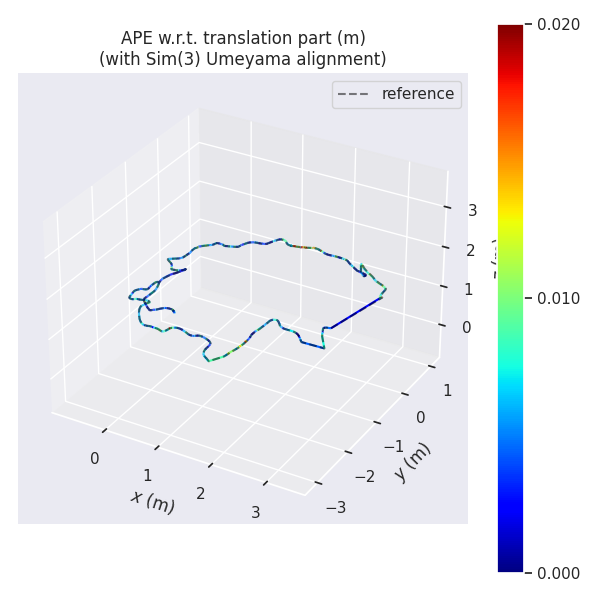
| ATE | 0.006748289751938822 | 0.00615963387195732 | 0.005812279889241823 | 0.0027565059658122655 | 0.00033097515617114037 | 0.020349710613607037 | 0.09554169178070507 |
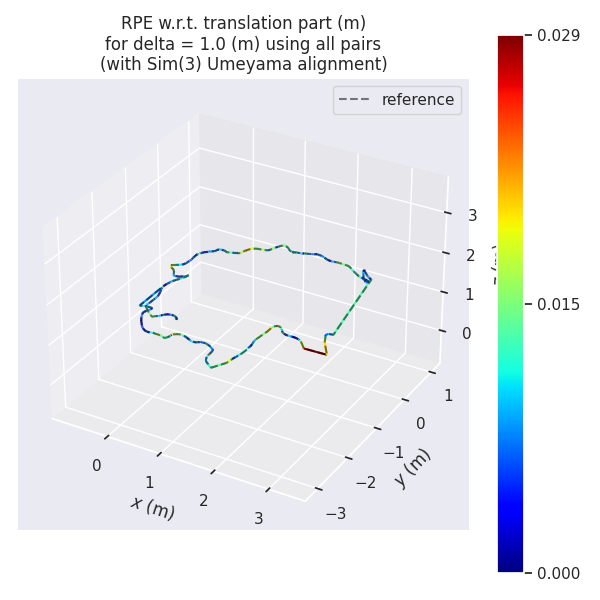
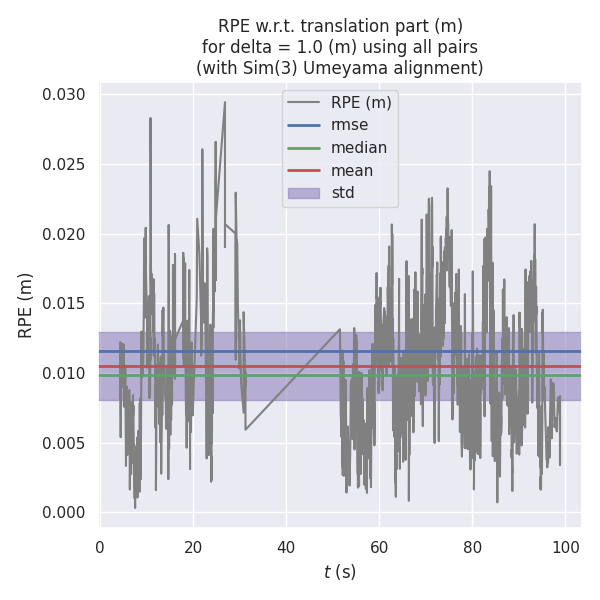
| RPE | 0.011566131532277093 | 0.010487166458582622 | 0.009867062559268683 | 0.004877985064748979 | 0.00032171917631853094 | 0.02942050699899524 | 0.24962489382852965 |
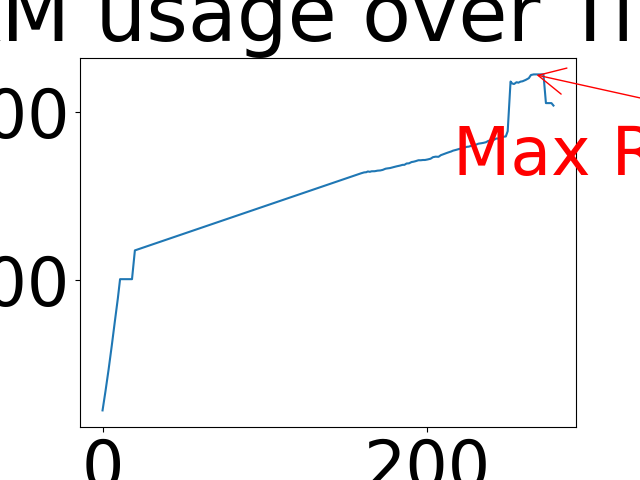
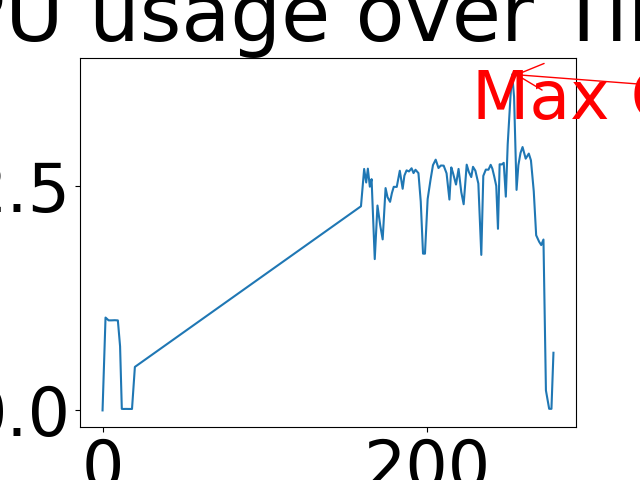
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 3.739265911513144 | 2.160166553998798 | 1113.18359375 |