Wiki Link
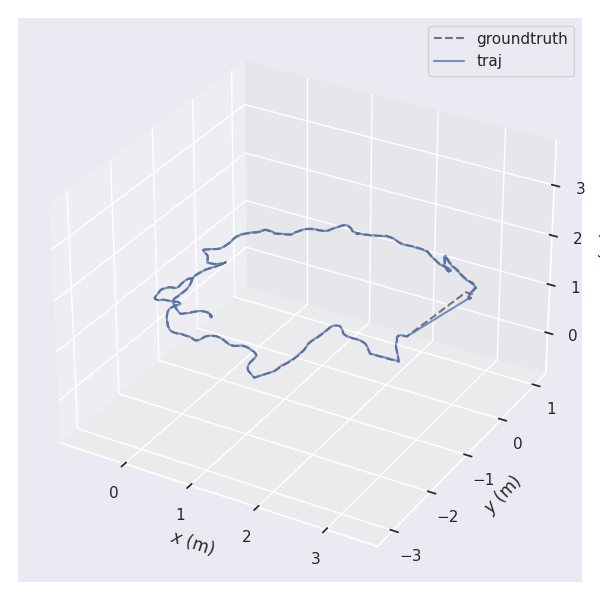
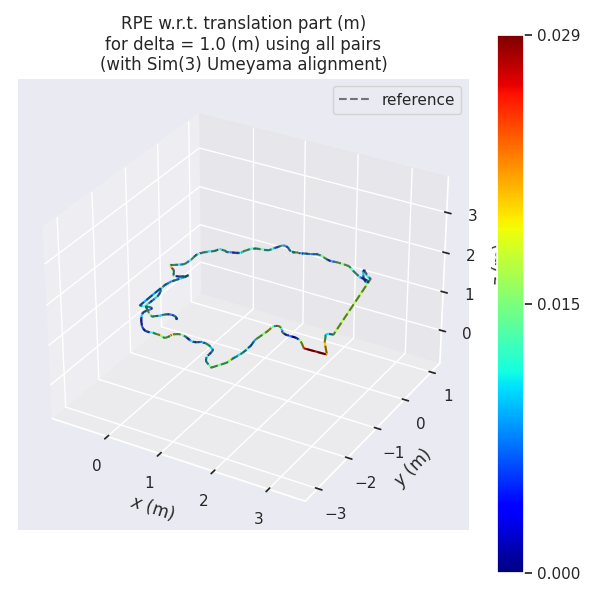
orb-slam2-ros-rgbd with rgbd_dataset_freiburg2_desk
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 2000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 30.0 |
| dataset-parameters | width | 640 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 520.90862 |
| dataset-parameters | fy | 521.007327 |
| dataset-parameters | cx | 325.141442 |
| dataset-parameters | cy | 249.701764 |
| dataset-parameters | k1 | 0.231222 |
| dataset-parameters | k2 | -0.784899 |
| dataset-parameters | p1 | -0.003257 |
| dataset-parameters | p2 | -0.000105 |
| dataset-parameters | k3 | 0.917205 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 40.0 |
| dataset-parameters | ThDepth | 40.0 |
| dataset-parameters | DepthMapFactor | 1.0 |
| algorithm-remap | rgb_topic | /slamhive/camera/rgb |
| algorithm-remap | dep_topic | /slamhive/camera/depth |
| dataset-remap | /slamhive/camera/rgb | /camera/rgb/image_color |
| dataset-remap | /slamhive/camera/depth | /camera/depth/image |
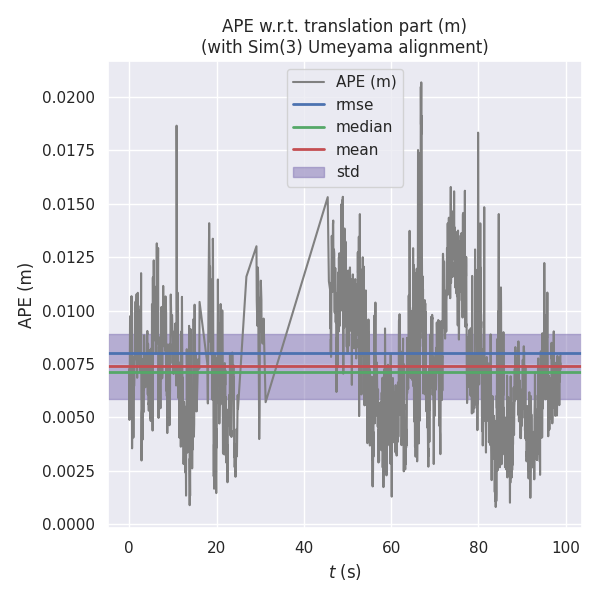
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
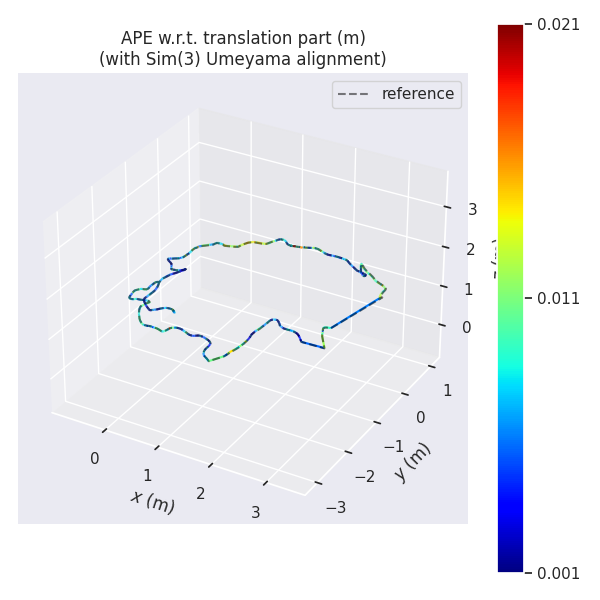
| ATE | 0.007999256539874421 | 0.007395622916269602 | 0.0071081512704888805 | 0.003048420389492171 | 0.0008077911005476402 | 0.0206714847710711 | 0.1345029971109012 |
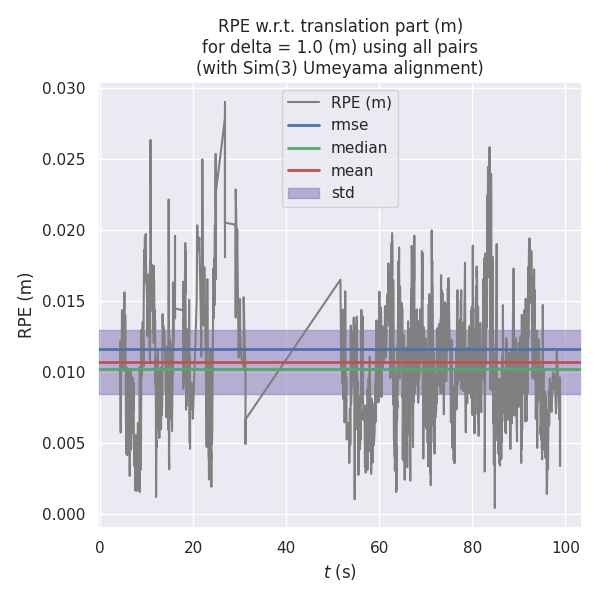
| RPE | 0.01162183471223344 | 0.010704845223301857 | 0.01024402289930111 | 0.0045247464927469176 | 0.0004394636109115468 | 0.028988665898116366 | 0.252980569812982 |
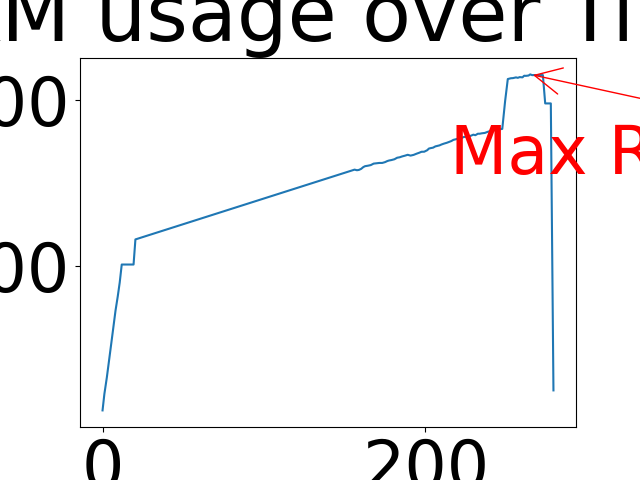
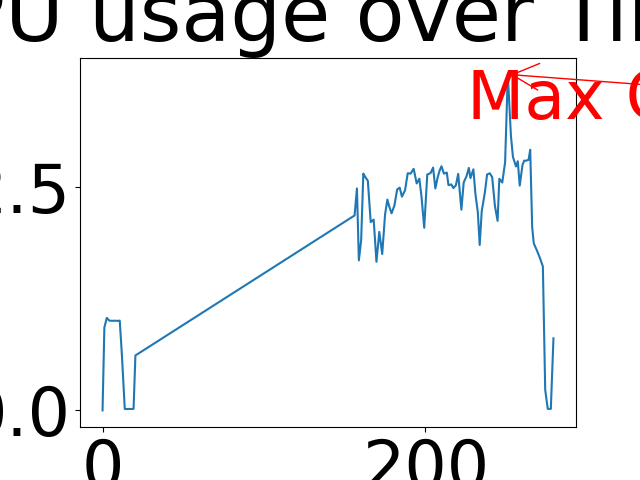
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 3.7592395482992806 | 2.0681359145467355 | 1076.87890625 |