Wiki Link
orb-slam2-ros-rgbd with rgbd_dataset_freiburg2_desk
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1500 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 30.0 |
| dataset-parameters | width | 640 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 520.90862 |
| dataset-parameters | fy | 521.007327 |
| dataset-parameters | cx | 325.141442 |
| dataset-parameters | cy | 249.701764 |
| dataset-parameters | k1 | 0.231222 |
| dataset-parameters | k2 | -0.784899 |
| dataset-parameters | p1 | -0.003257 |
| dataset-parameters | p2 | -0.000105 |
| dataset-parameters | k3 | 0.917205 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 40.0 |
| dataset-parameters | ThDepth | 40.0 |
| dataset-parameters | DepthMapFactor | 1.0 |
| algorithm-remap | rgb_topic | /slamhive/camera/rgb |
| algorithm-remap | dep_topic | /slamhive/camera/depth |
| dataset-remap | /slamhive/camera/rgb | /camera/rgb/image_color |
| dataset-remap | /slamhive/camera/depth | /camera/depth/image |
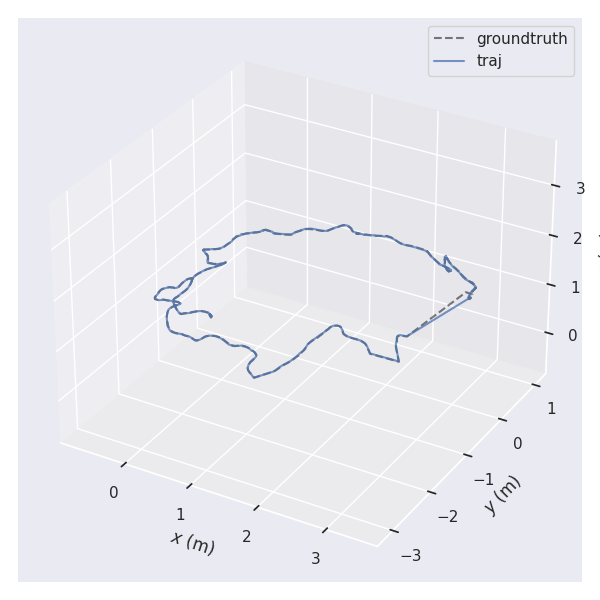
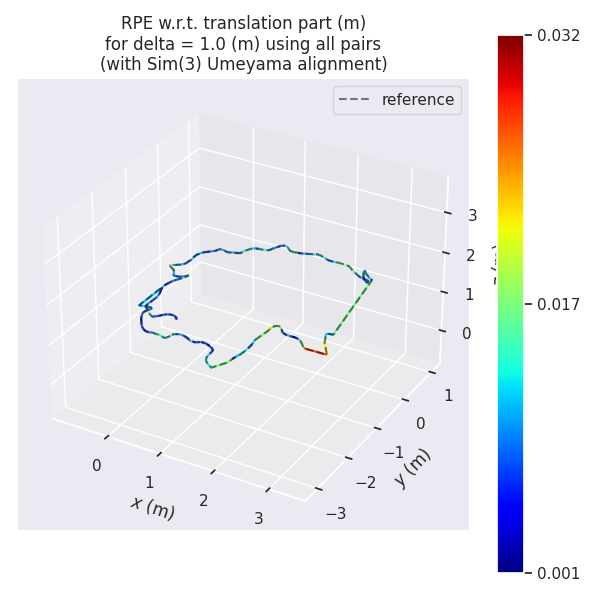
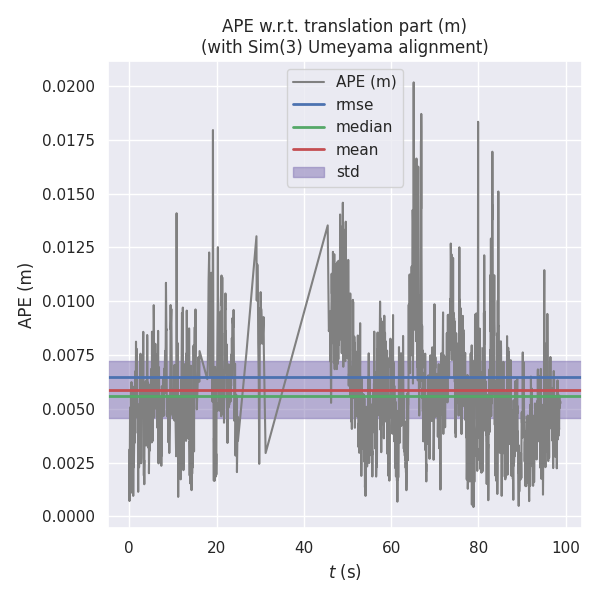
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
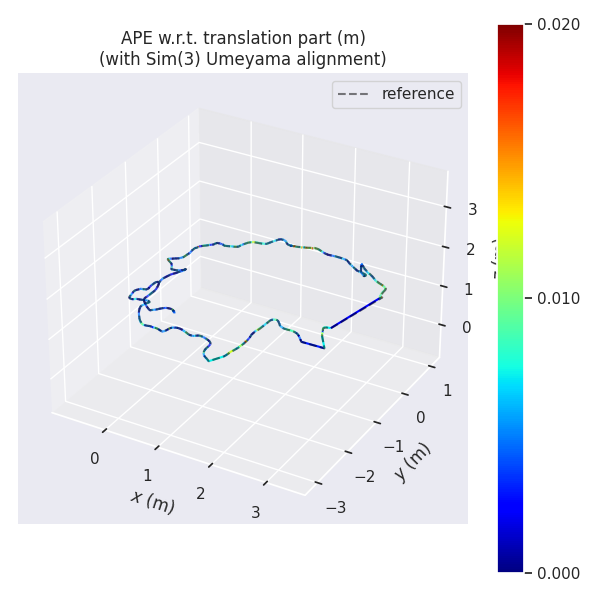
| ATE | 0.006465092481926169 | 0.005894065399255046 | 0.005570827420939462 | 0.0026565793549530405 | 0.00042973289991442813 | 0.02018005576734204 | 0.08986445471969526 |
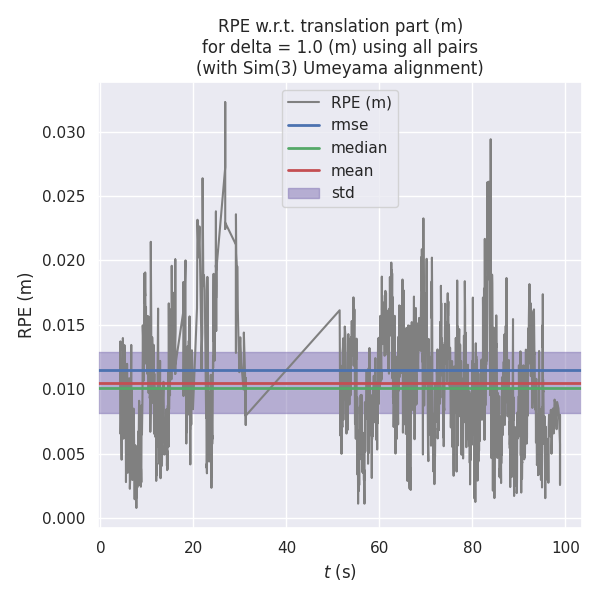
| RPE | 0.01151124632300267 | 0.010507239982698808 | 0.0100893586631789 | 0.004701776244656708 | 0.000781359253552638 | 0.03228918927652973 | 0.25322430133779805 |
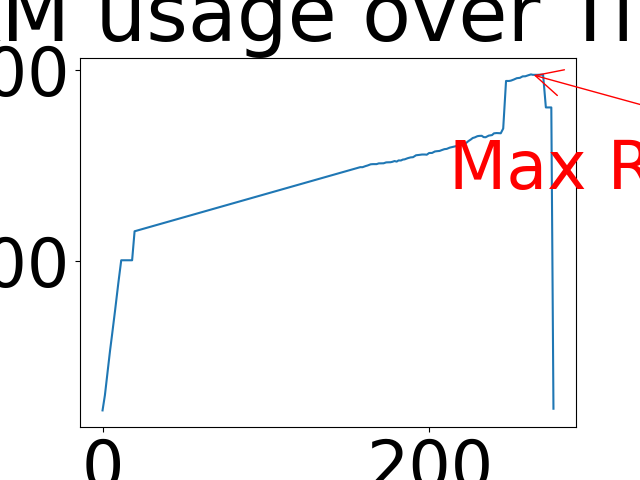
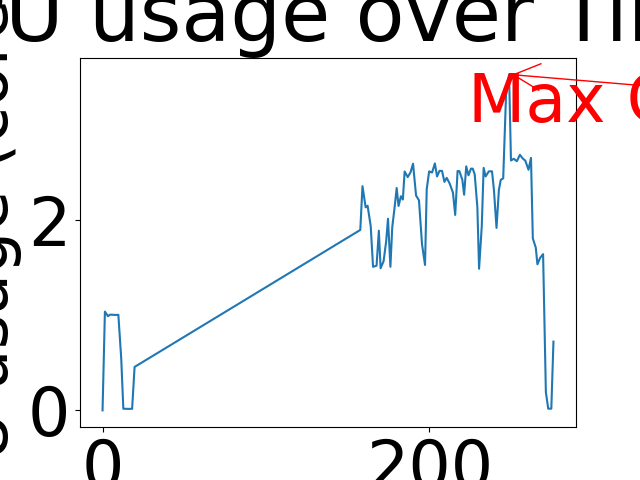
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 3.525628546261006 | 1.8975139657934277 | 989.0546875 |