Wiki Link

orb-slam2-ros-rgbd with rgbd_dataset_freiburg2_desk
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1250 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 30.0 |
| dataset-parameters | width | 640 |
| dataset-parameters | height | 480 |
| dataset-parameters | fx | 520.90862 |
| dataset-parameters | fy | 521.007327 |
| dataset-parameters | cx | 325.141442 |
| dataset-parameters | cy | 249.701764 |
| dataset-parameters | k1 | 0.231222 |
| dataset-parameters | k2 | -0.784899 |
| dataset-parameters | p1 | -0.003257 |
| dataset-parameters | p2 | -0.000105 |
| dataset-parameters | k3 | 0.917205 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 40.0 |
| dataset-parameters | ThDepth | 40.0 |
| dataset-parameters | DepthMapFactor | 1.0 |
| algorithm-remap | rgb_topic | /slamhive/camera/rgb |
| algorithm-remap | dep_topic | /slamhive/camera/depth |
| dataset-remap | /slamhive/camera/rgb | /camera/rgb/image_color |
| dataset-remap | /slamhive/camera/depth | /camera/depth/image |
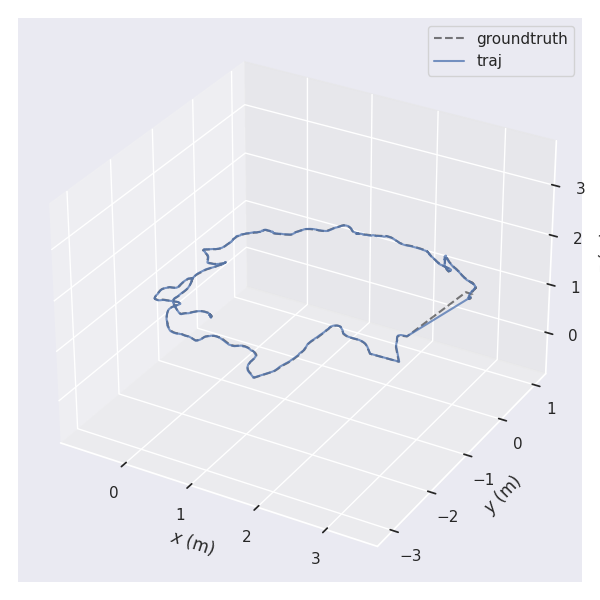
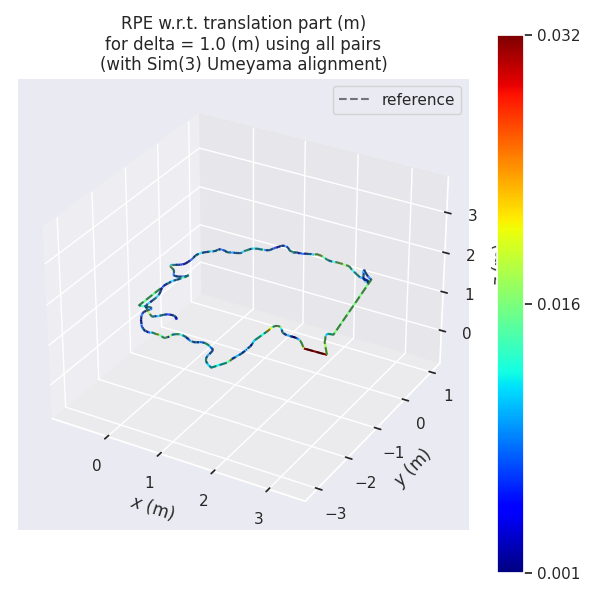
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
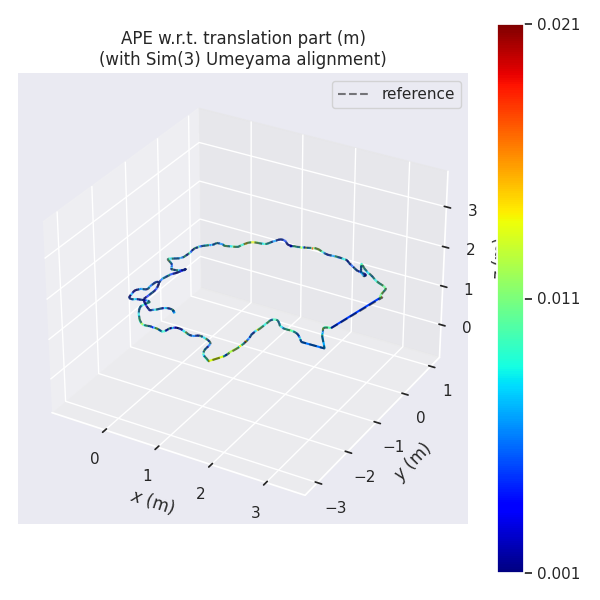
| ATE | 0.007103630276674382 | 0.006536855015301141 | 0.0062646830275356925 | 0.002780483701915421 | 0.0006967172998844953 | 0.020861260067939147 | 0.10803820661355348 |
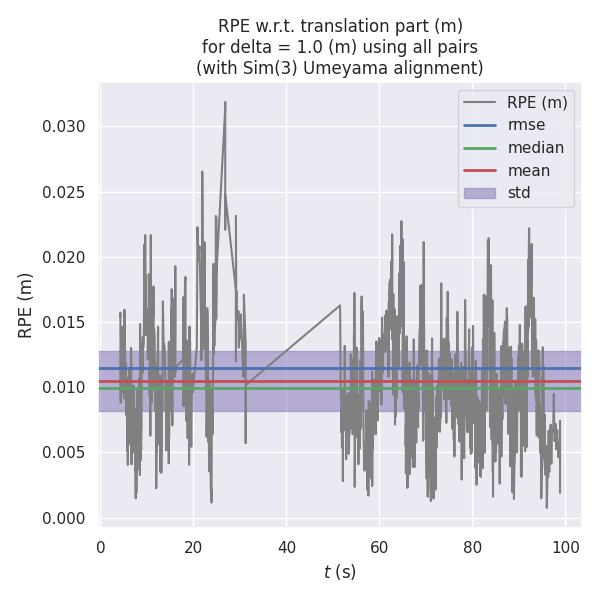
| RPE | 0.011450595109228112 | 0.010483623226460426 | 0.009922877191954255 | 0.004605406865967243 | 0.0007398204849810701 | 0.03184480511205428 | 0.24938287613212057 |
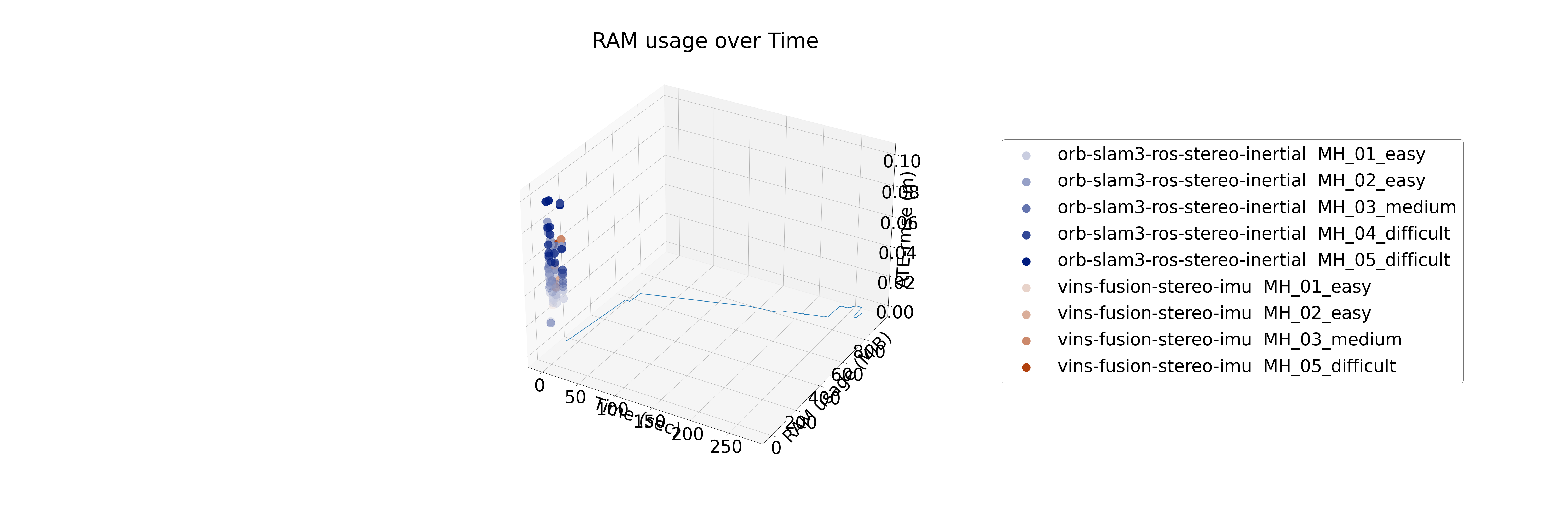
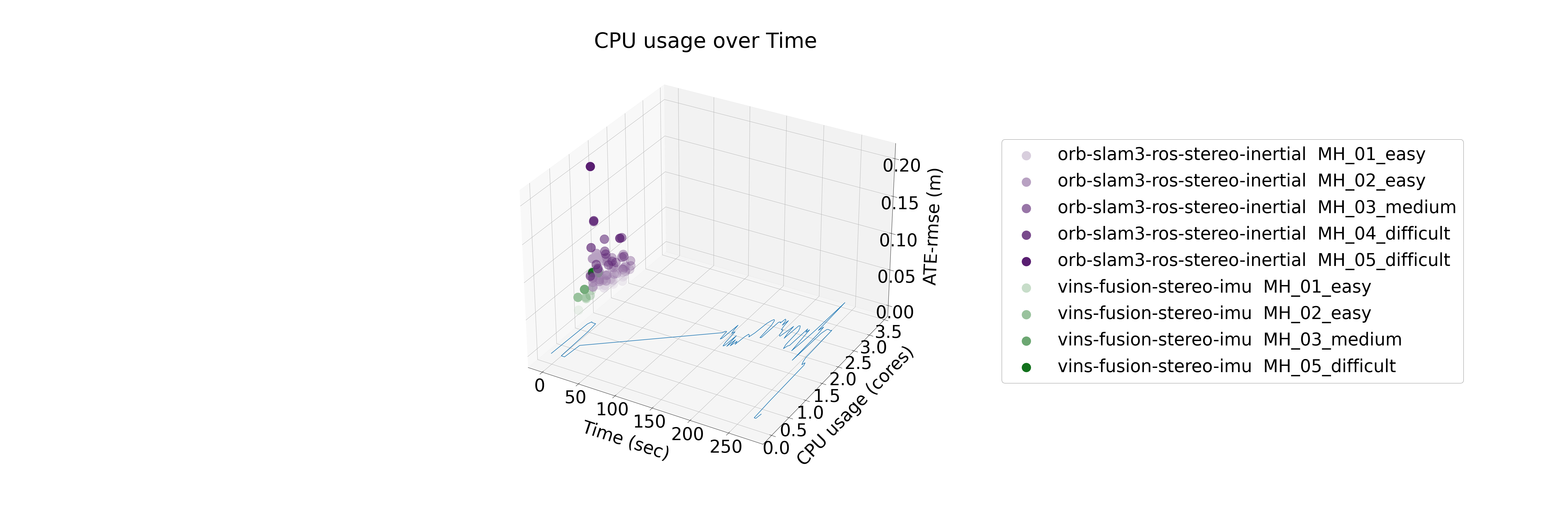
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 3.3703914401399566 | 1.7627955985815125 | 944.33984375 |