Wiki Link

vins-fusion-stereo-imu with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | max_cnt | 150 |
| algorithm-parameters | min_dist | 30 |
| algorithm-parameters | freq | 10 |
| algorithm-parameters | F_threshold | 1.0 |
| algorithm-parameters | max_solver_time | 0.04 |
| algorithm-parameters | max_num_iterations | 8 |
| algorithm-parameters | keyframe_parallax | 10.0 |
| algorithm-parameters | show_track | 1 |
| algorithm-parameters | flow_back | 1 |
| algorithm-parameters | image1_topic | /cam1/image_raw |
| dataset-parameters | image_width | 150 |
| dataset-parameters | image_height | 96 |
| dataset-parameters | cam0_k1 | -0.28340811 |
| dataset-parameters | cam0_k2 | 0.07395907 |
| dataset-parameters | cam0_p1 | 0.00019359 |
| dataset-parameters | cam0_p2 | 1.76187114e-05 |
| dataset-parameters | estimate_td | 0 |
| dataset-parameters | td | 0.0 |
| dataset-parameters | image0_topic | /cam0/image_raw |
| dataset-parameters | body_T_cam0 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0, 0, 0, 1] |
| dataset-parameters | cam0_calib | cam0_pinhole.yaml |
| dataset-parameters | estimate_extrinsic | 0 |
| dataset-parameters | body_T_cam1 | [0.0125552670891, -0.999755099723, 0.0182237714554, -0.0198435579556, 0.999598781151, 0.0130119051815, 0.0251588363115, 0.0453689425024, -0.0253898008918, 0.0179005838253, 0.999517347078, 0.00786212447038, 0, 0, 0, 1] |
| dataset-parameters | cam1_calib | cam1_pinhole.yaml |
| dataset-parameters | cam1_p1 | 0.00019359 |
| dataset-parameters | cam1_p2 | 1.76187114e-05 |
| dataset-parameters | cam1_k1 | -0.28340811 |
| dataset-parameters | cam1_k2 | 0.07395907 |
| dataset-parameters | gyr_n | 0.01 |
| dataset-parameters | acc_n | 0.1 |
| dataset-parameters | gyr_w | 0.0001 |
| dataset-parameters | acc_w | 0.001 |
| dataset-parameters | imu_topic | /imu0 |
| dataset-parameters | g_norm | 9.81007 |
| dataset-parameters | image_frequency | 10 |
| dataset-parameters | imu_frequency | 200 |
| dataset-parameters | cam0_fx | 91.7308 |
| dataset-parameters | cam0_fy | 91.4592 |
| dataset-parameters | cam0_cx | 73.443 |
| dataset-parameters | cam0_cy | 49.675 |
| dataset-parameters | cam1_fx | 91.5174 |
| dataset-parameters | cam1_fy | 91.2268 |
| dataset-parameters | cam1_cx | 75.9998 |
| dataset-parameters | cam1_cy | 51.0476 |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-frequency | /imu0 | 1 |
| dataset-frequency | /cam1/image_raw | 2 |
| dataset-resolution | /cam0/image_raw | 0.2 |
| dataset-resolution | /cam1/image_raw | 0.2 |
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
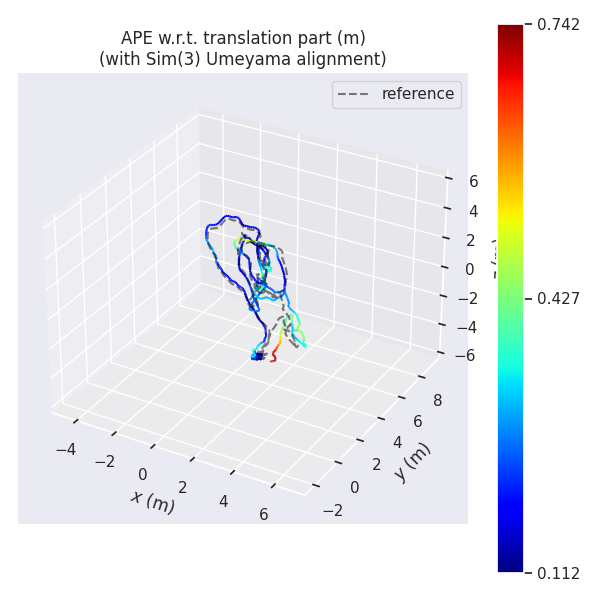
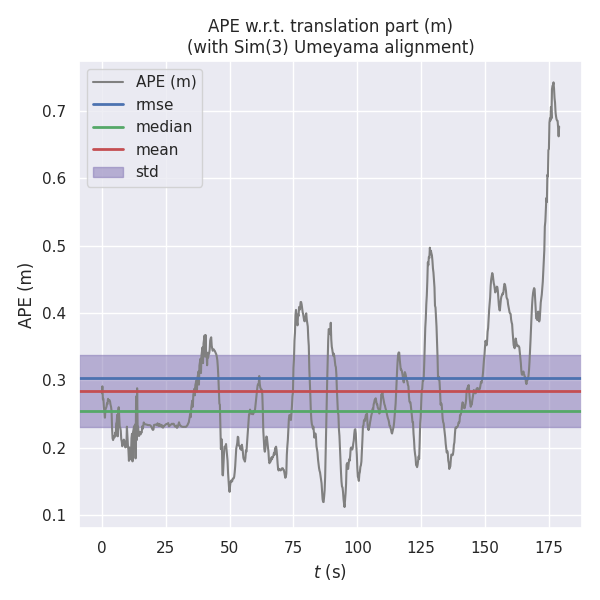
| ATE | 0.3033128641759534 | 0.2839621925092204 | 0.25449712276574343 | 0.10660284611574324 | 0.11196482021019111 | 0.7424049330794287 | 82.43082944285985 |
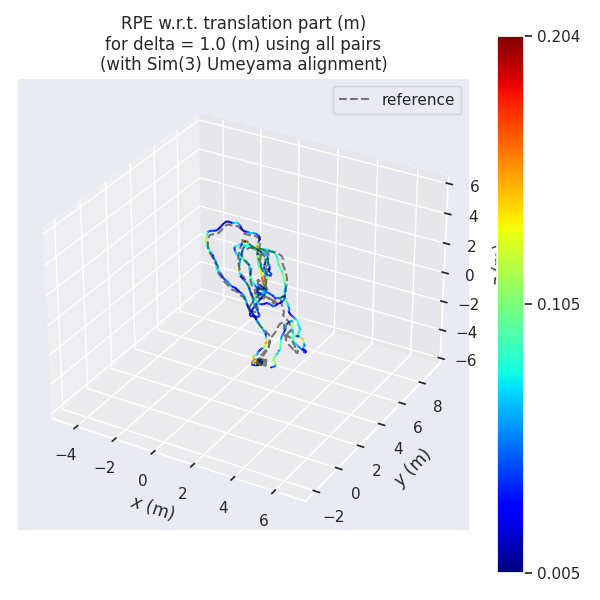
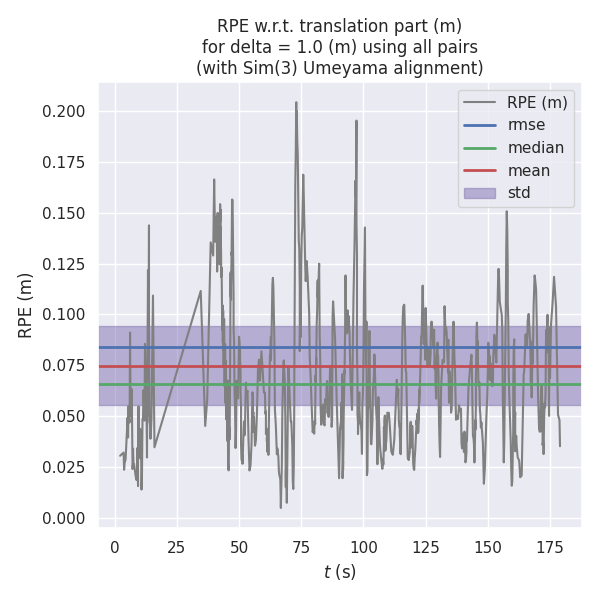
| RPE | 0.08422707412445857 | 0.07471474499359615 | 0.06573692610675759 | 0.03888324698515977 | 0.004873352258616953 | 0.2043456062240352 | 6.157765613512188 |
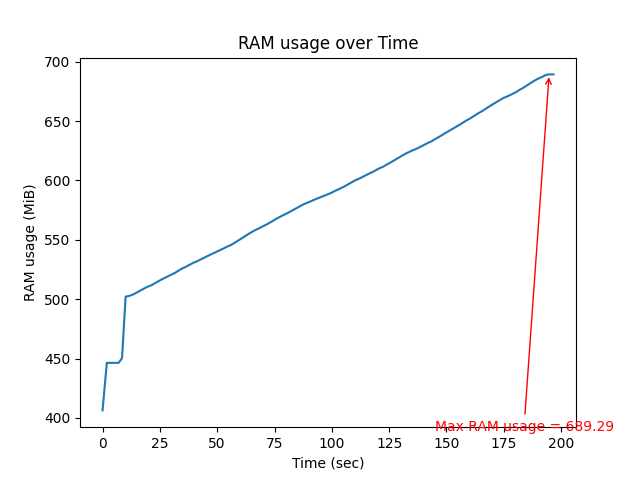
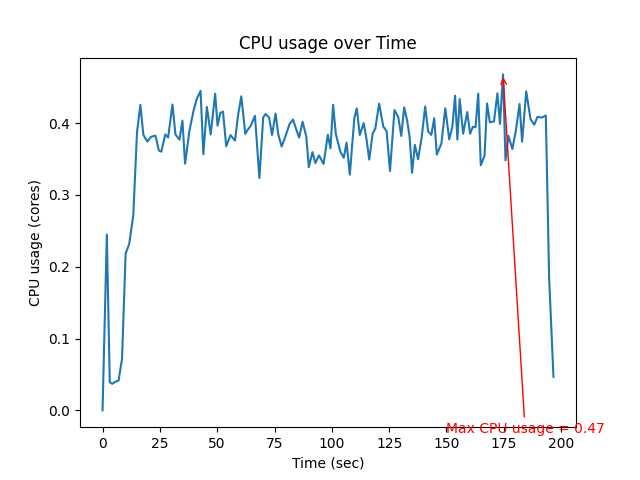
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 0.46792704353521236 | 0.36668553650696895 | 689.29296875 |