Wiki Link

orb-slam3-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 5 |
| dataset-parameters | width | 451 |
| dataset-parameters | height | 288 |
| dataset-parameters | newWidth | 360 |
| dataset-parameters | newHeight | 210 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-resolution | /cam0/image_raw | 0.6 |
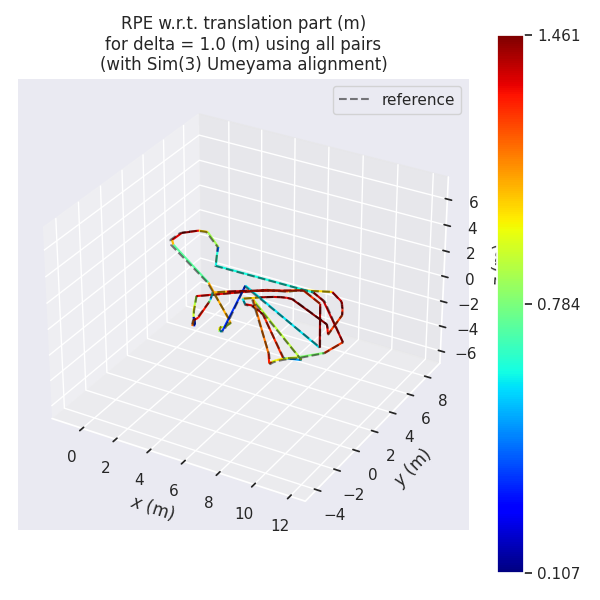
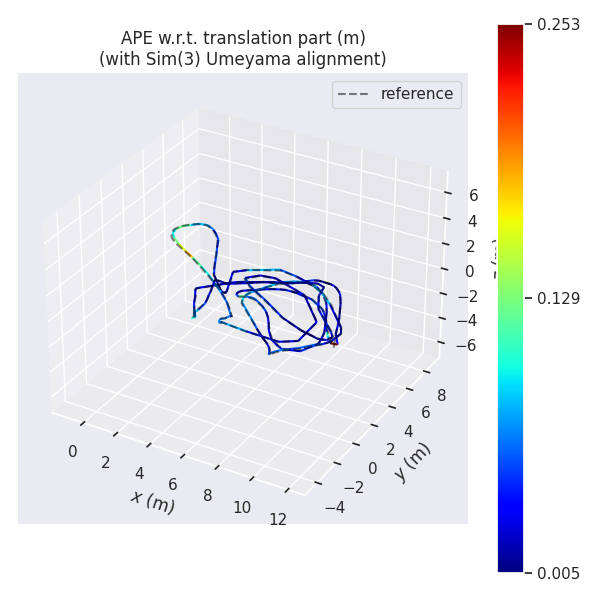
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
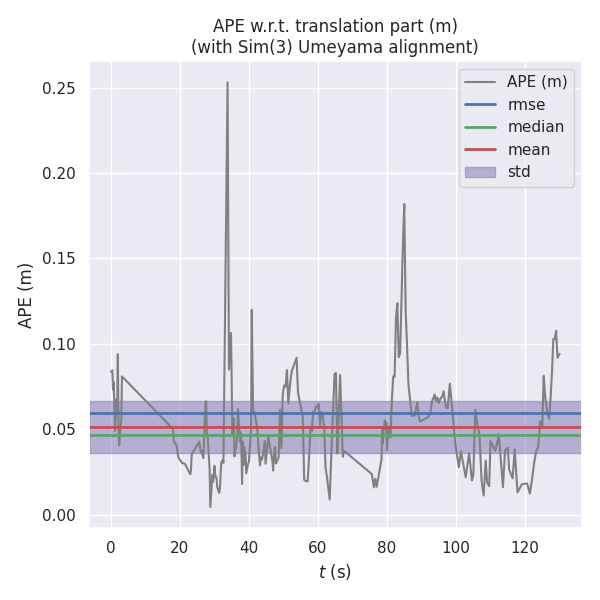
| ATE | 0.05969090095158889 | 0.05148885780628171 | 0.046660803853289856 | 0.03019770153864195 | 0.004537037404742288 | 0.253026829460308 | 0.8123648336620262 |
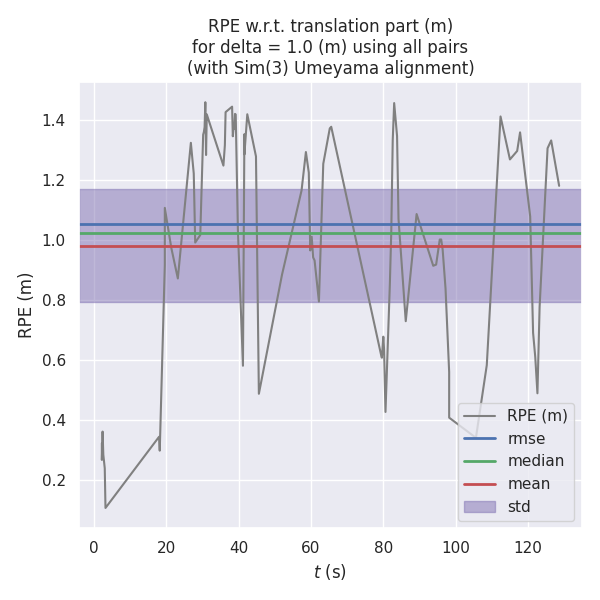
| RPE | 1.0532058062857843 | 0.982460182646886 | 1.023214449413442 | 0.3794923713430041 | 0.10692889762549179 | 1.460793420998241 | 95.39485245389166 |
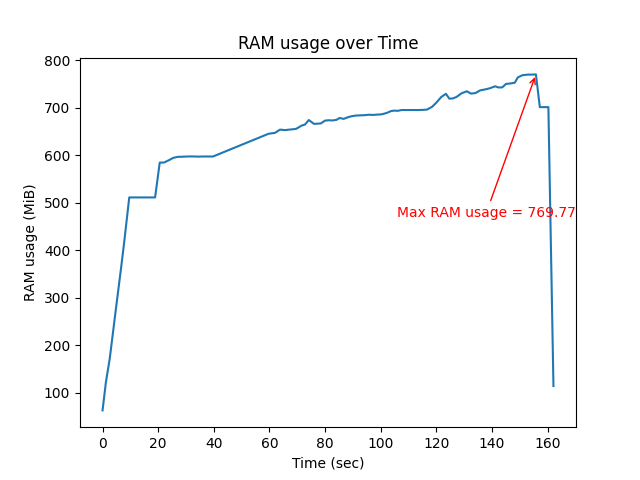
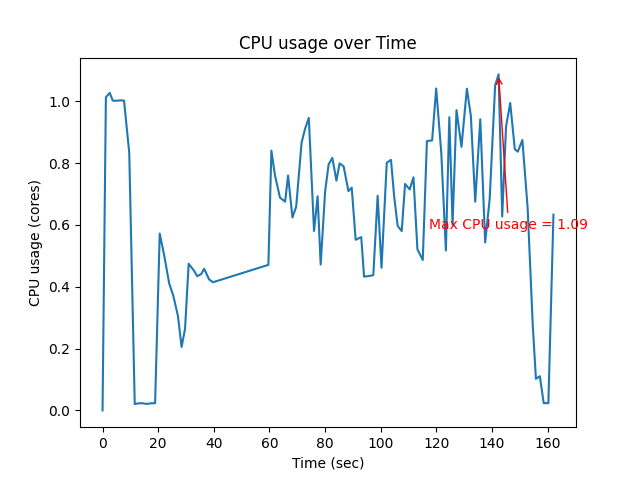
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0870548350074978 | 0.6230708903554073 | 769.765625 |