Wiki Link
orb-slam3-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 20 |
| dataset-parameters | width | 451 |
| dataset-parameters | height | 288 |
| dataset-parameters | newWidth | 360 |
| dataset-parameters | newHeight | 210 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-resolution | /cam0/image_raw | 0.6 |
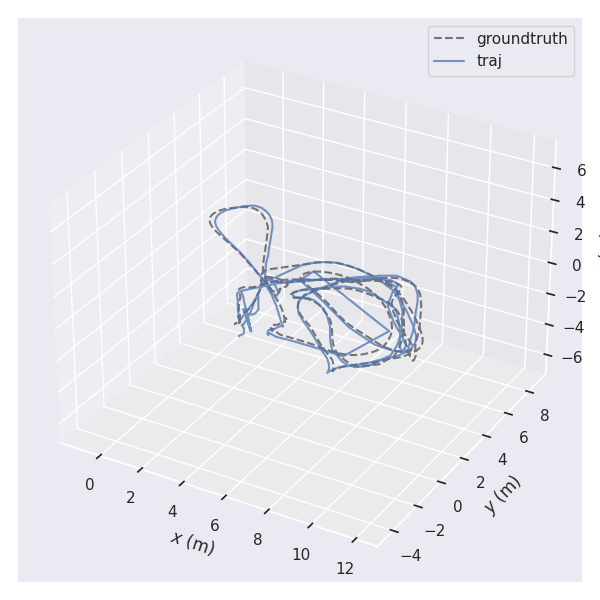
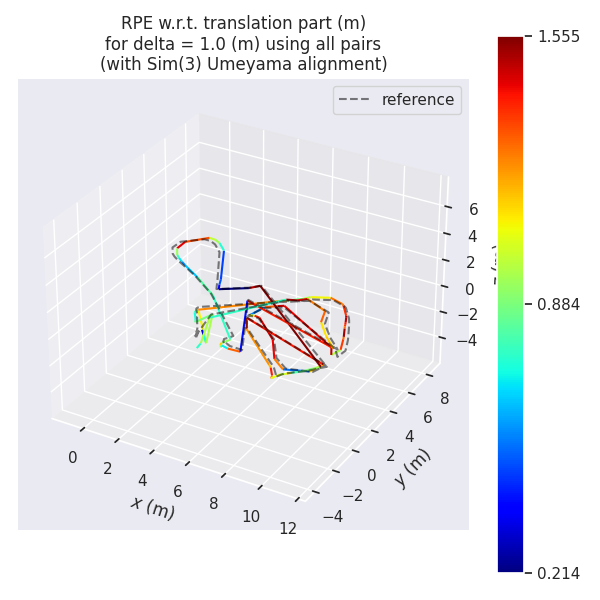
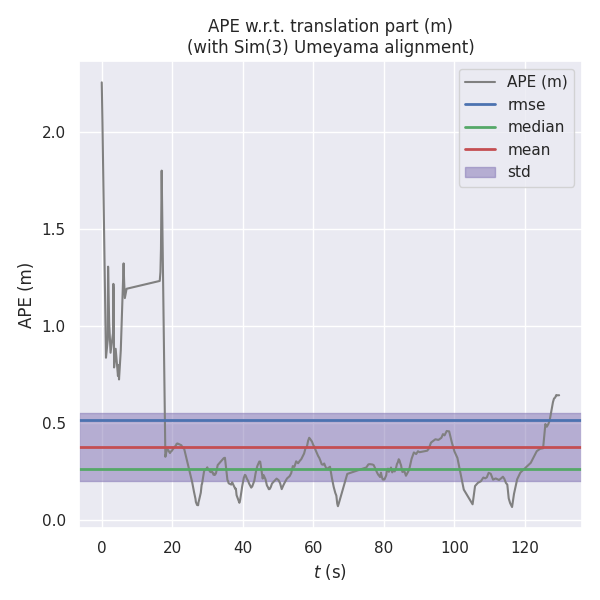
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
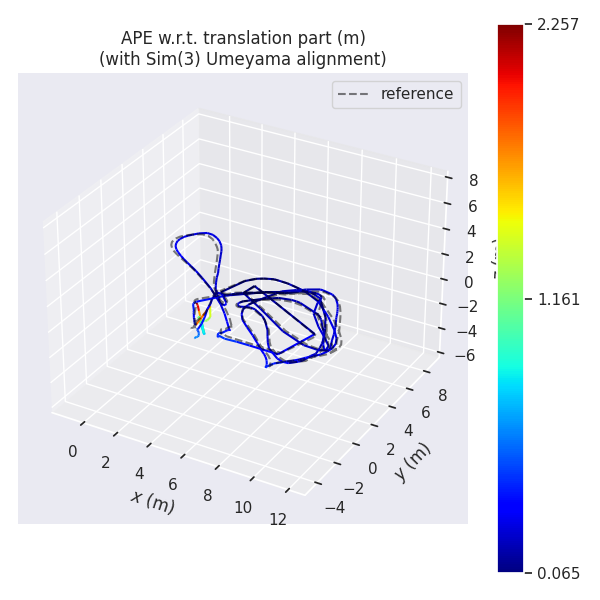
| ATE | 0.5138076279477535 | 0.374219448446651 | 0.2625371876717505 | 0.35207681397896873 | 0.06489001309589222 | 2.2565393062488863 | 68.63955241969724 |
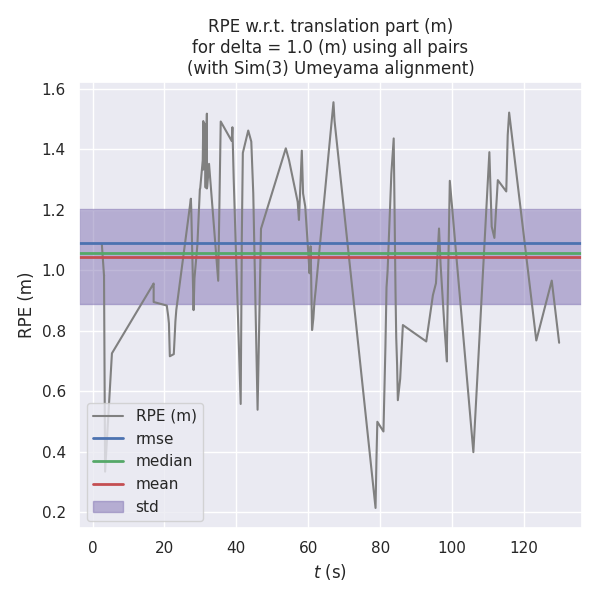
| RPE | 1.090524674099111 | 1.0447901879625479 | 1.0570791472889685 | 0.3125020447231608 | 0.213633468437021 | 1.5549609322558595 | 117.73516241707826 |
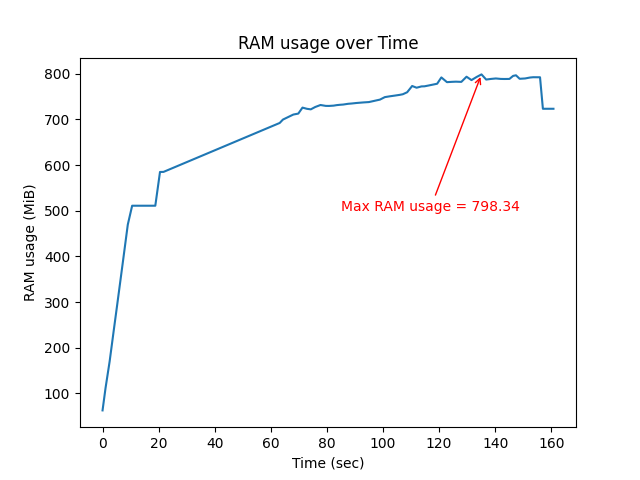
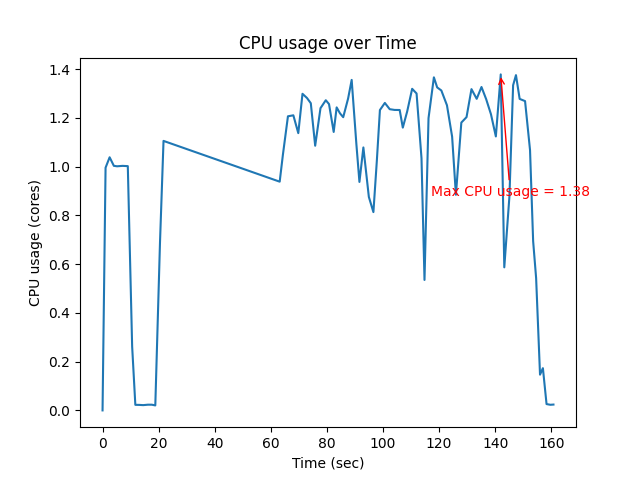
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.378355108466275 | 0.9591020371924848 | 798.34375 |