Wiki Link
orb-slam3-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 1 |
| dataset-parameters | width | 451 |
| dataset-parameters | height | 288 |
| dataset-parameters | newWidth | 360 |
| dataset-parameters | newHeight | 210 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-resolution | /cam0/image_raw | 0.6 |
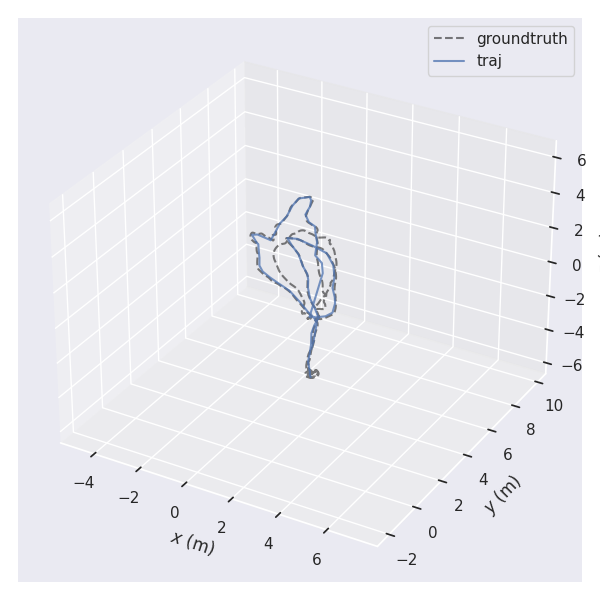
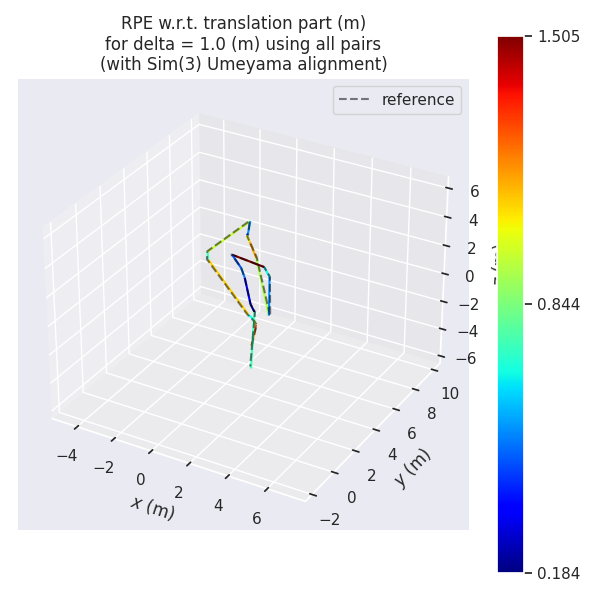
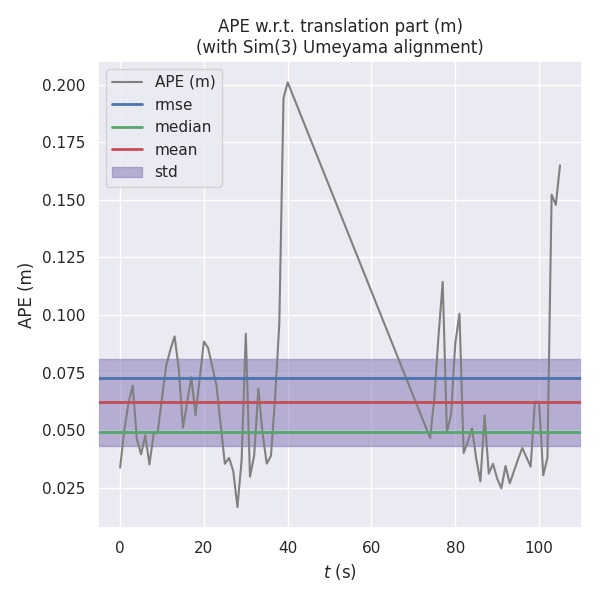
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
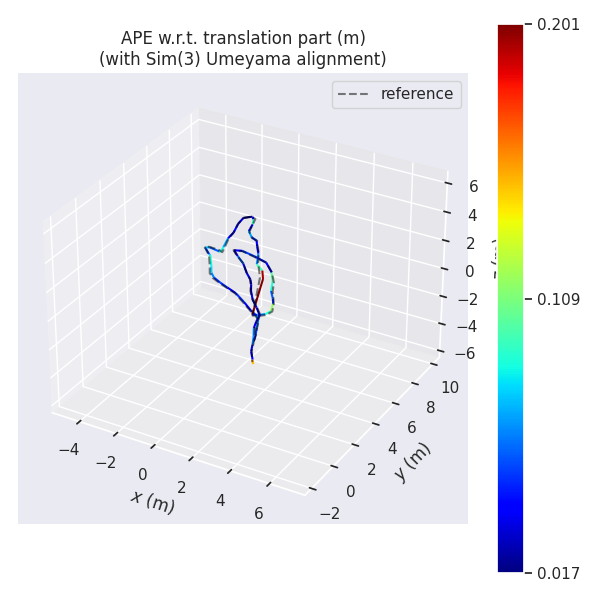
| ATE | 0.07279212977349091 | 0.062043099493653255 | 0.04922459425553366 | 0.03807030289059158 | 0.016614274904591952 | 0.20104399305753753 | 0.36031120267333044 |
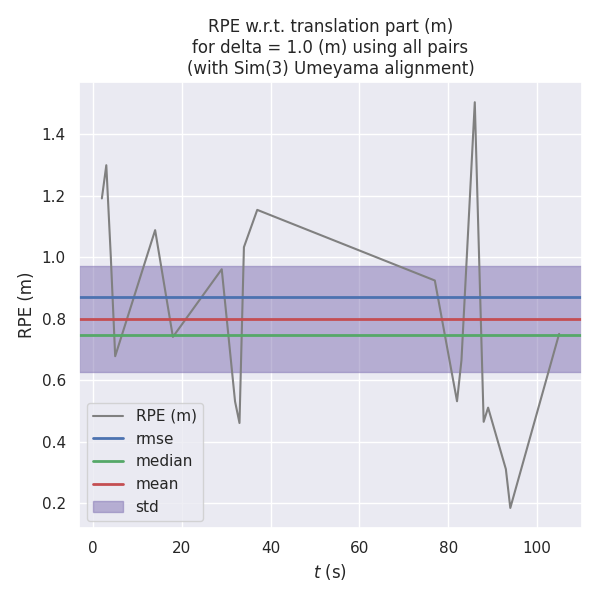
| RPE | 0.8700250122916772 | 0.7992709800794738 | 0.7455368373365624 | 0.343670514324302 | 0.1836406972659406 | 1.5046987993493293 | 15.138870440262663 |
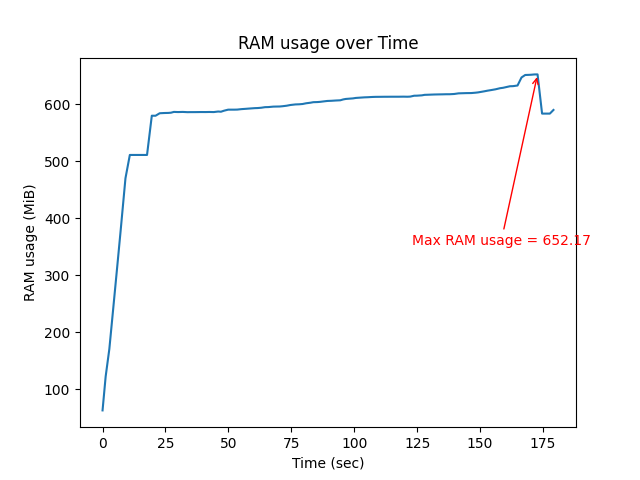
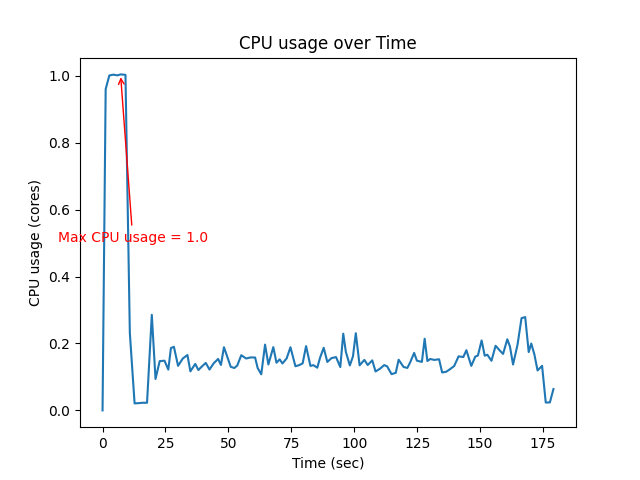
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0044561592116703 | 0.1892337003408118 | 652.16796875 |