Wiki Link
orb-slam3-ros-mono with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 5 |
| dataset-parameters | width | 451 |
| dataset-parameters | height | 288 |
| dataset-parameters | newWidth | 360 |
| dataset-parameters | newHeight | 210 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-resolution | /cam0/image_raw | 0.6 |
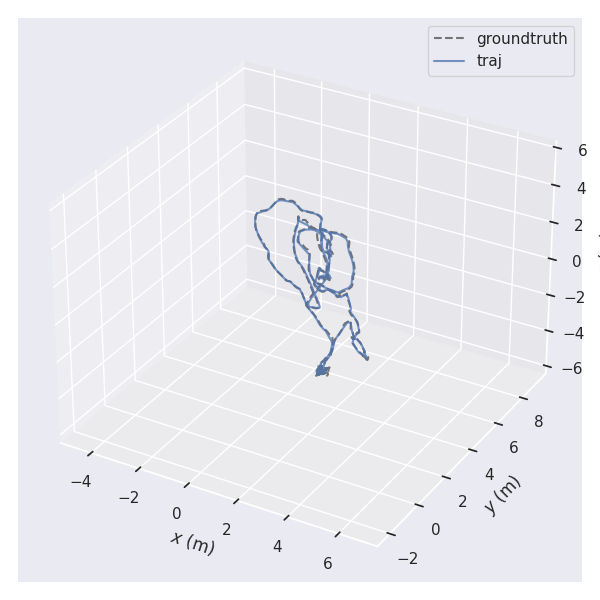
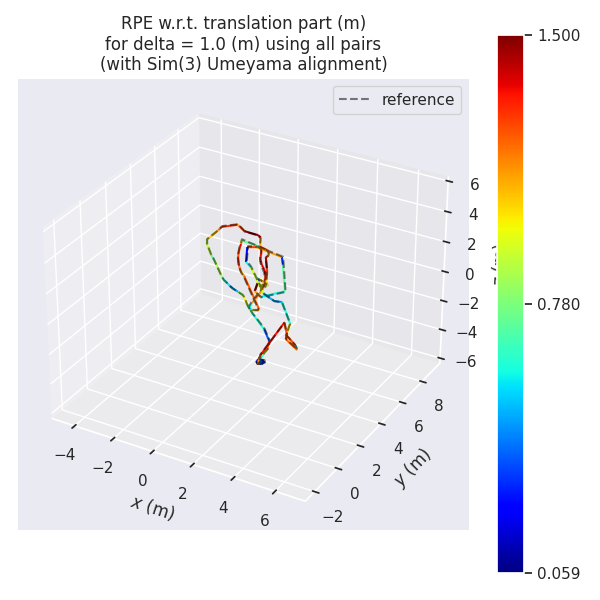
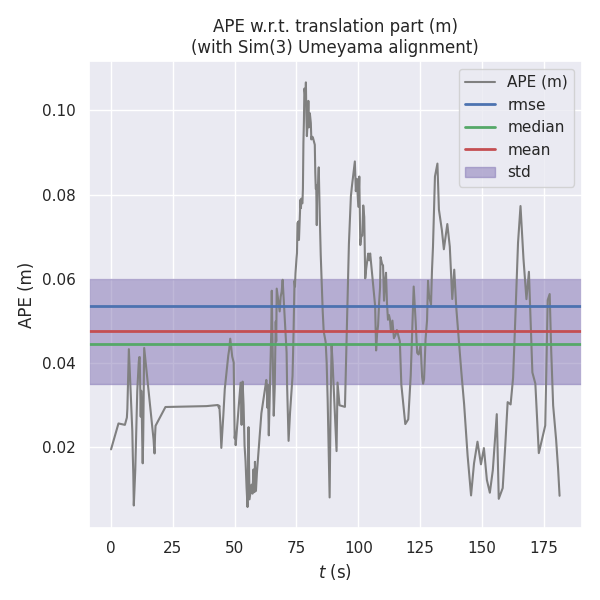
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
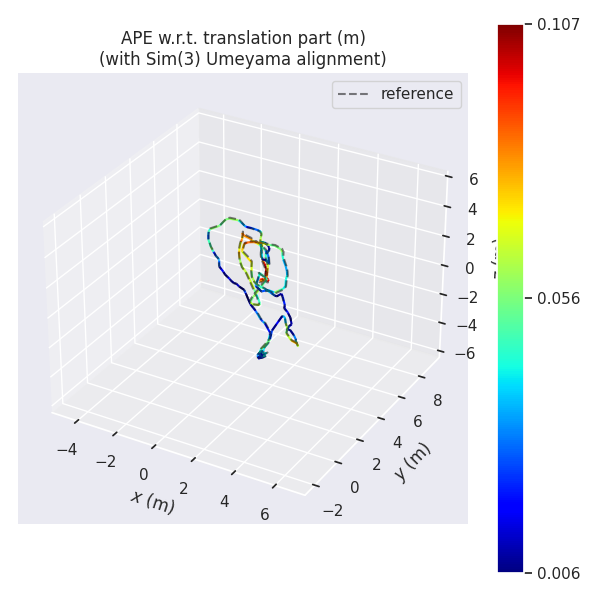
| ATE | 0.05366086409025045 | 0.047531634518740595 | 0.04445596290484209 | 0.024904458534350804 | 0.005868111841252116 | 0.10666075831563948 | 0.7486669670772059 |
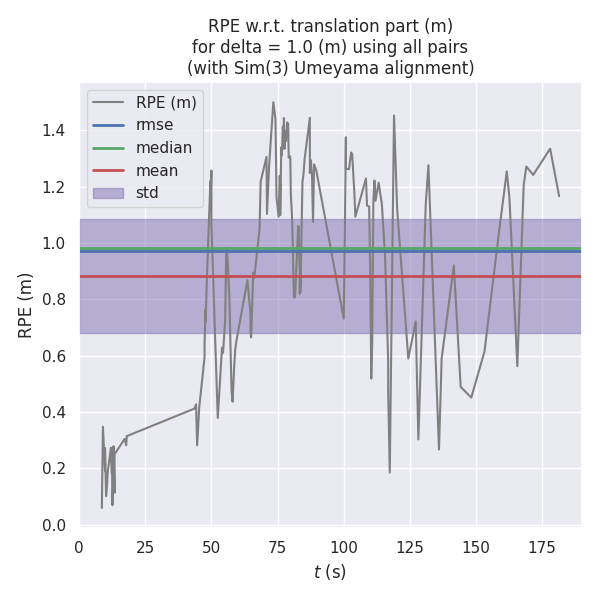
| RPE | 0.9725922153947191 | 0.8839420554109749 | 0.9831582152895458 | 0.4056871456211406 | 0.059101384478797855 | 1.4999378066875997 | 146.62002070419317 |
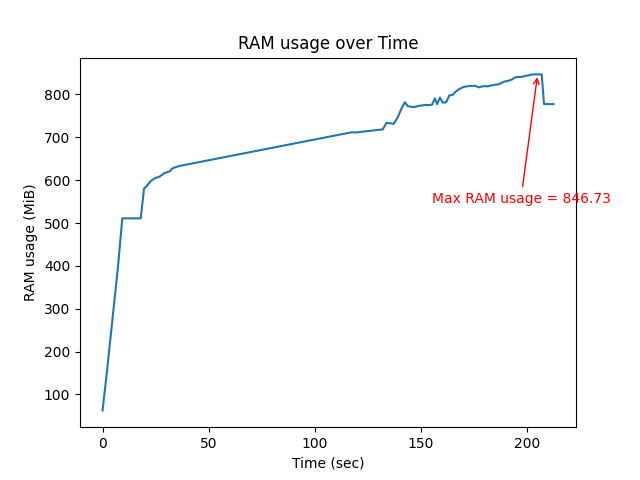
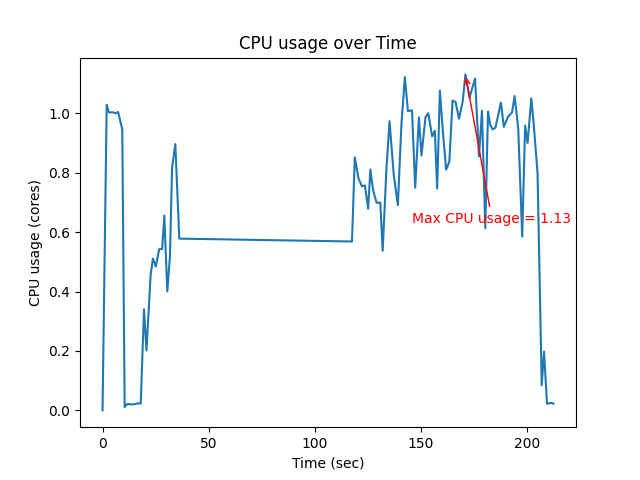
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.1304505524128203 | 0.7393767856999568 | 846.7265625 |