Wiki Link
orb-slam3-ros-mono with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 10 |
| dataset-parameters | width | 451 |
| dataset-parameters | height | 288 |
| dataset-parameters | newWidth | 360 |
| dataset-parameters | newHeight | 210 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-resolution | /cam0/image_raw | 0.6 |
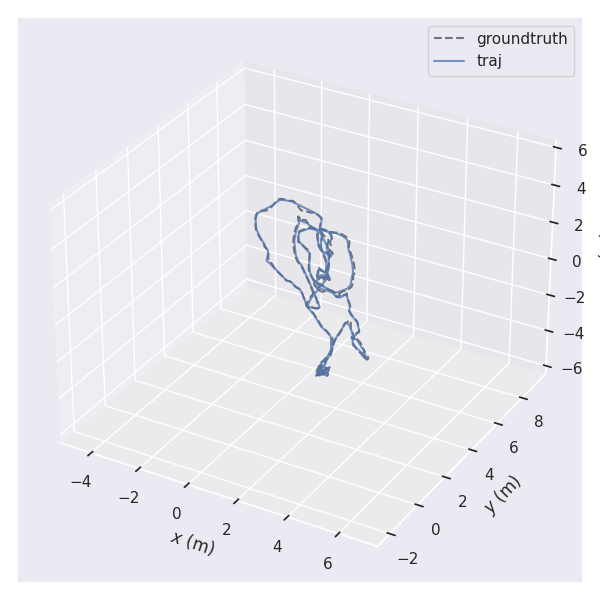
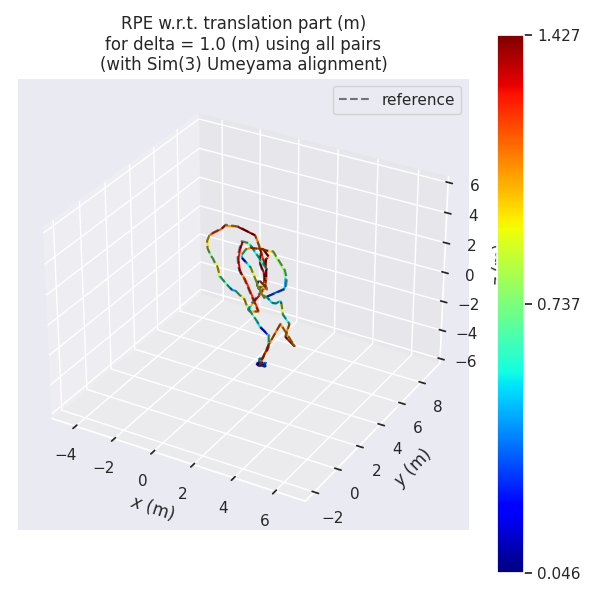
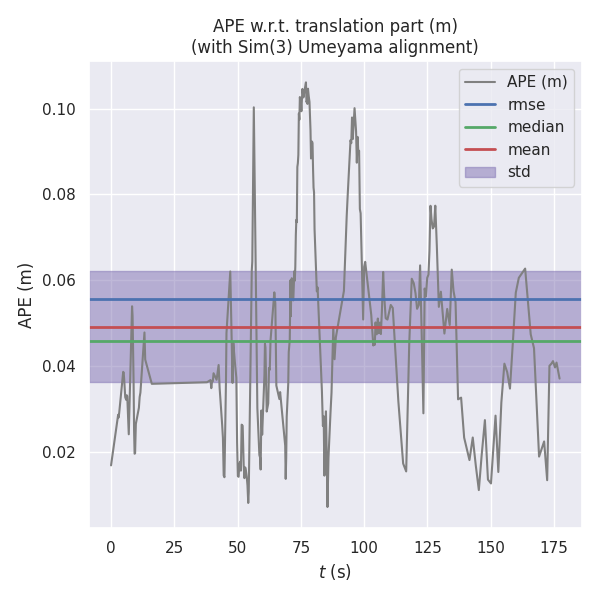
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
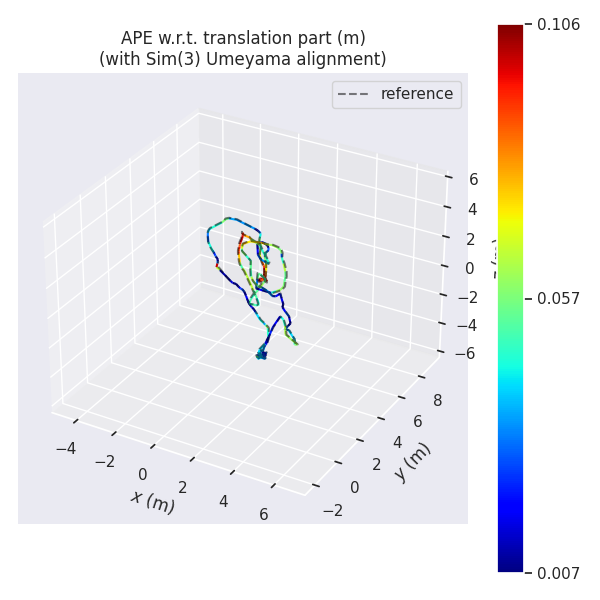
| ATE | 0.055561829283812085 | 0.049180246912581396 | 0.04590595003957261 | 0.025853823449946557 | 0.007110641913058449 | 0.10614898420534648 | 0.787214802707687 |
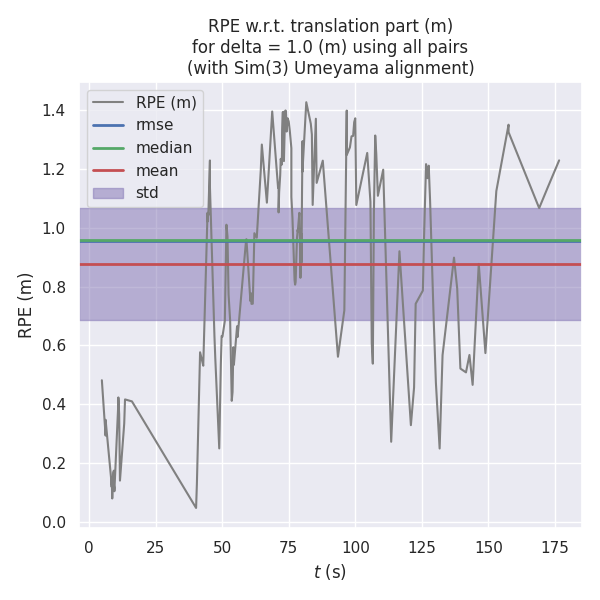
| RPE | 0.955376328622769 | 0.8755872658887554 | 0.957344776152233 | 0.38221835265483406 | 0.046208289087563005 | 1.4272941537060357 | 152.42823619188442 |
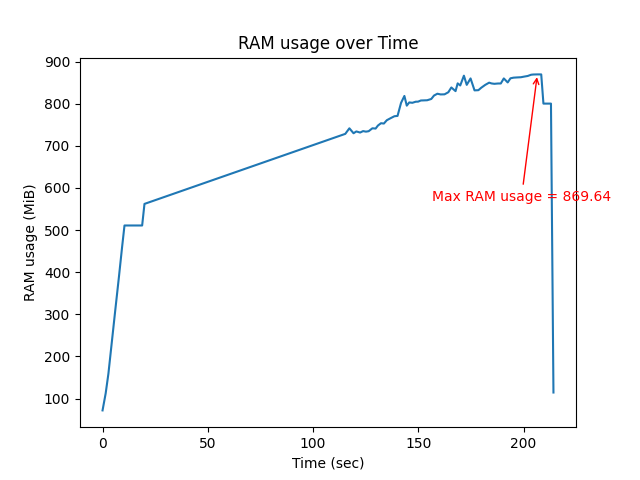
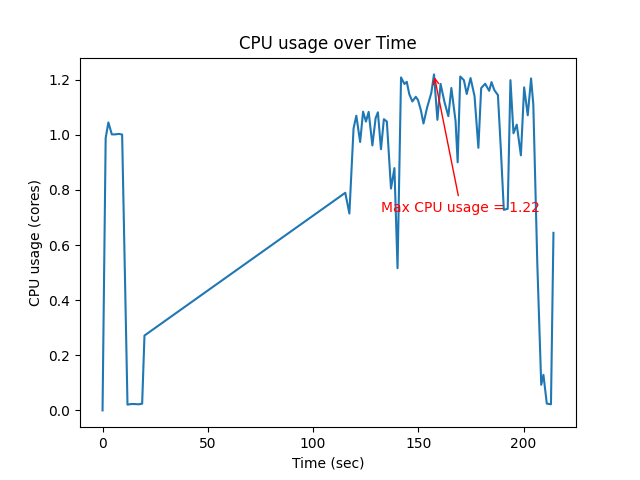
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.2195657201888062 | 0.8970500993583702 | 869.640625 |