Wiki Link

orb-slam3-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 5 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | newWidth | 480 |
| dataset-parameters | newHeight | 280 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-resolution | /cam0/image_raw | 0.8 |
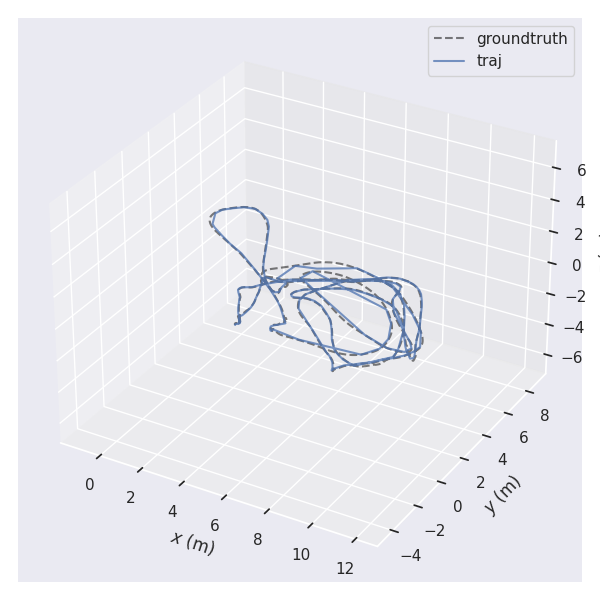
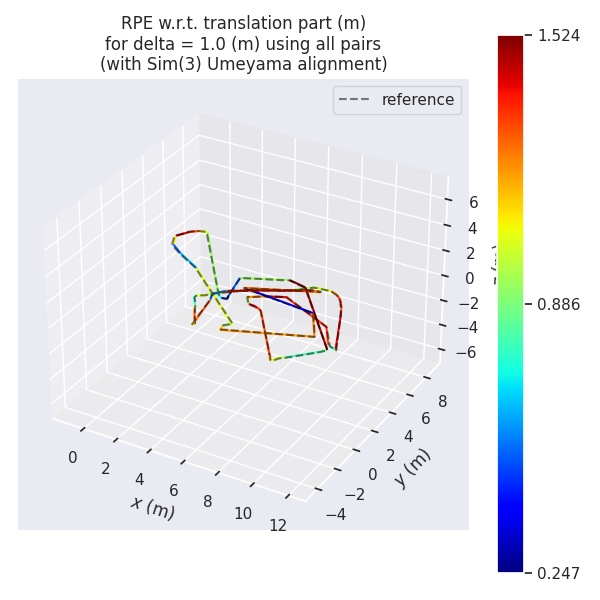
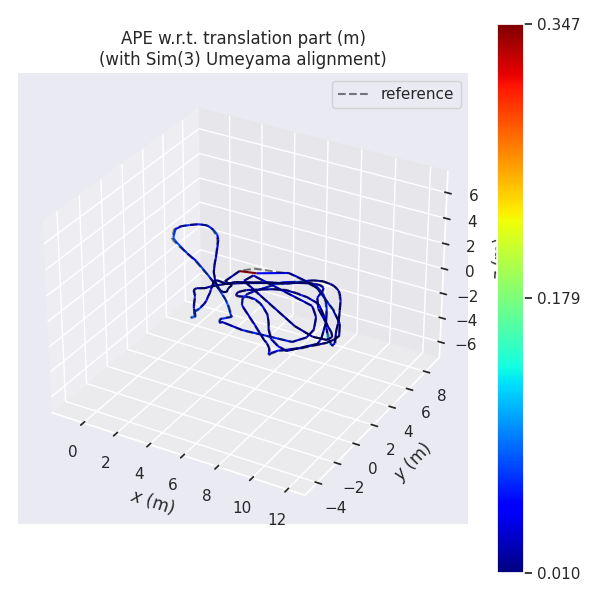
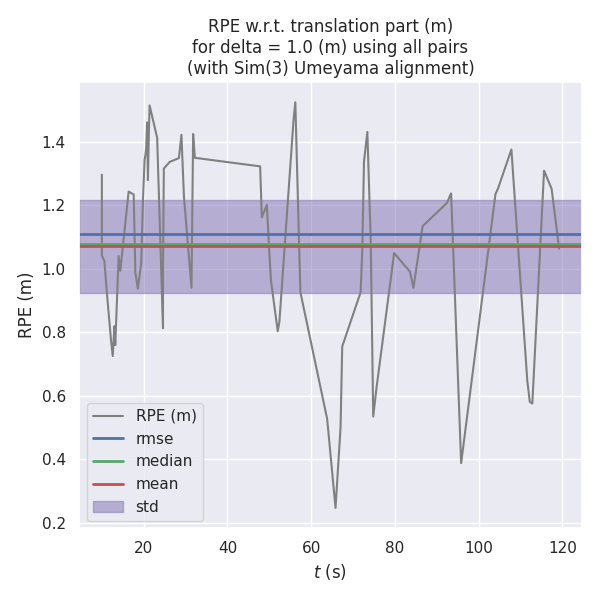
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.05415849882896862 | 0.04556074776355038 | 0.04046565366918809 | 0.029280731866425998 | 0.010026794669824963 | 0.34748141014247436 | 0.592494885072294 |
| RPE | 1.110276510928516 | 1.070391862181907 | 1.078147481921467 | 0.29491556773820576 | 0.2470284310293222 | 1.5241828487264624 | 88.75540301181114 |
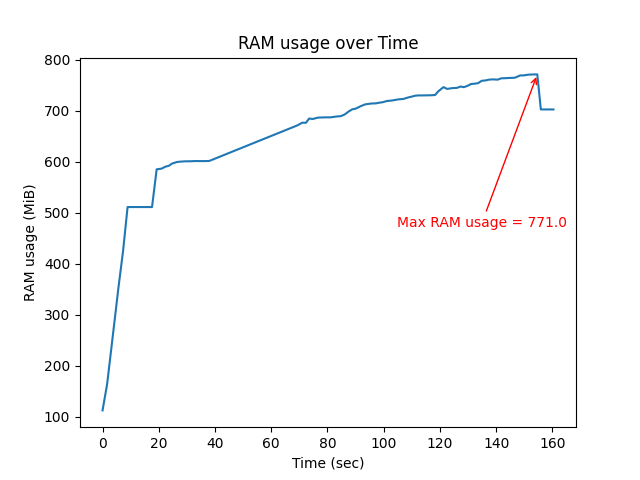
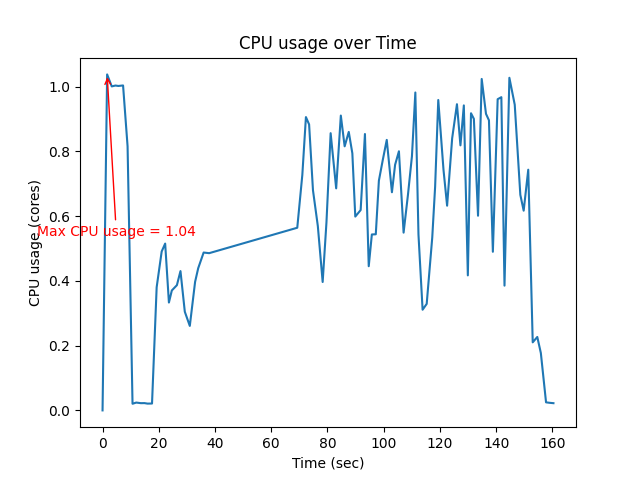
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.037377886809634 | 0.6007974397175988 | 770.99609375 |