Wiki Link
orb-slam3-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 10 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | newWidth | 480 |
| dataset-parameters | newHeight | 280 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-resolution | /cam0/image_raw | 0.8 |
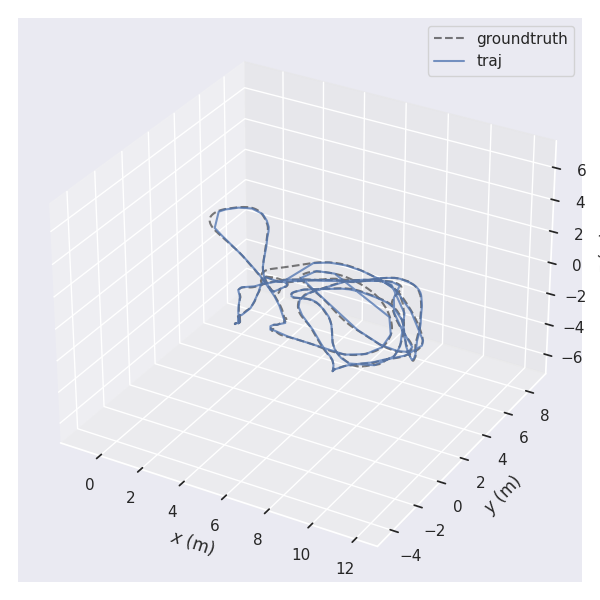
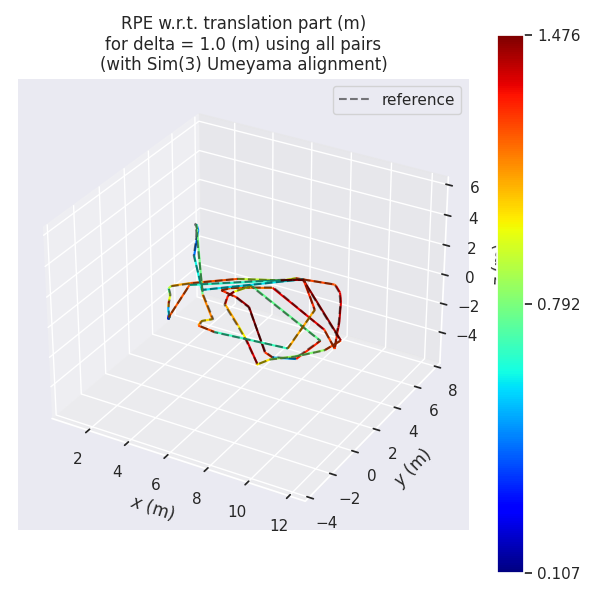
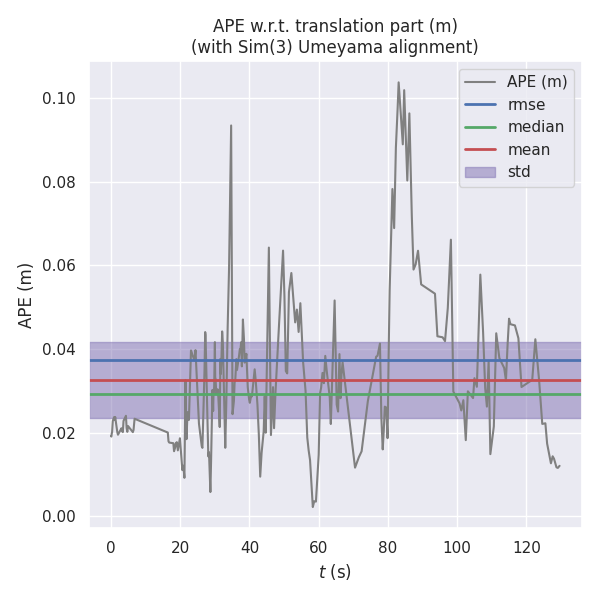
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
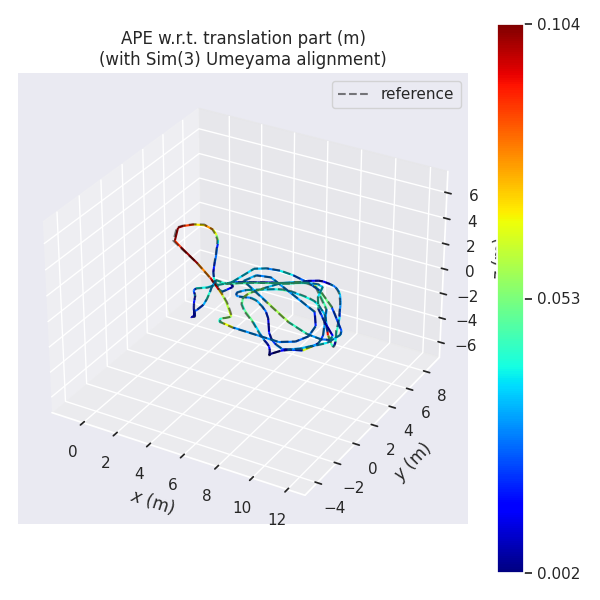
| ATE | 0.03741163248754027 | 0.03269903342739374 | 0.02934985706219362 | 0.01817700355660868 | 0.0022096114624368434 | 0.10380568808252655 | 0.3135171749657424 |
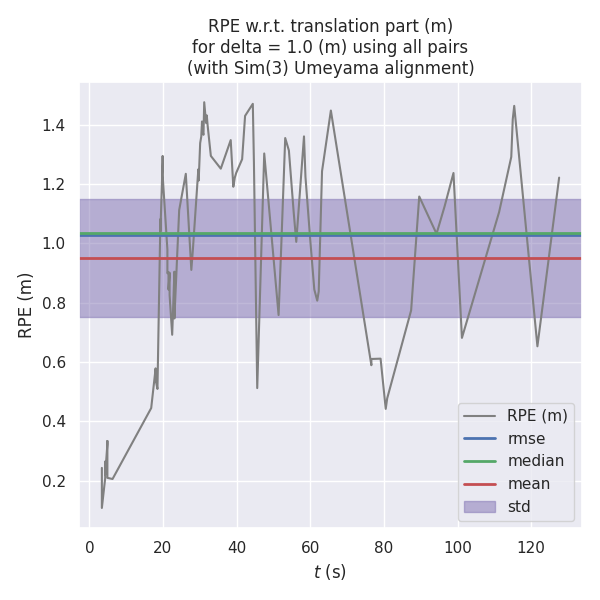
| RPE | 1.0298751139090652 | 0.9508742255951061 | 1.0362604477402724 | 0.3955767401505263 | 0.10749588106328489 | 1.4761687397931949 | 95.4578475224289 |
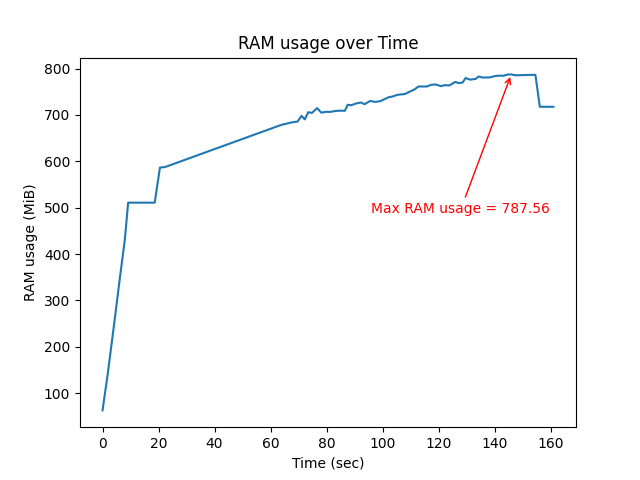
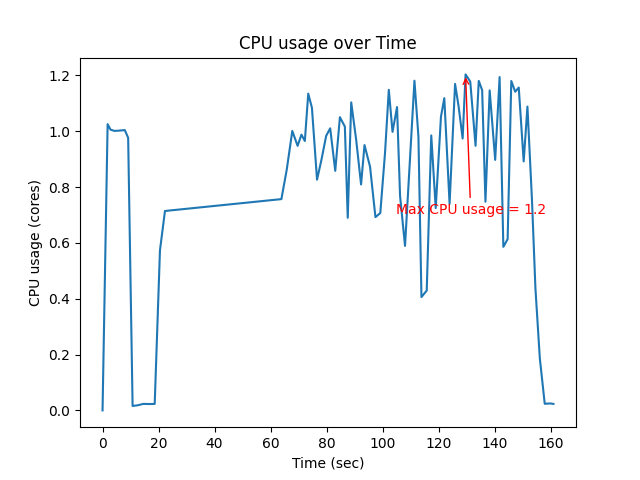
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.2032596181063526 | 0.8049076138383905 | 787.5625 |