Wiki Link
orb-slam3-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 1 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | newWidth | 480 |
| dataset-parameters | newHeight | 280 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-resolution | /cam0/image_raw | 0.8 |
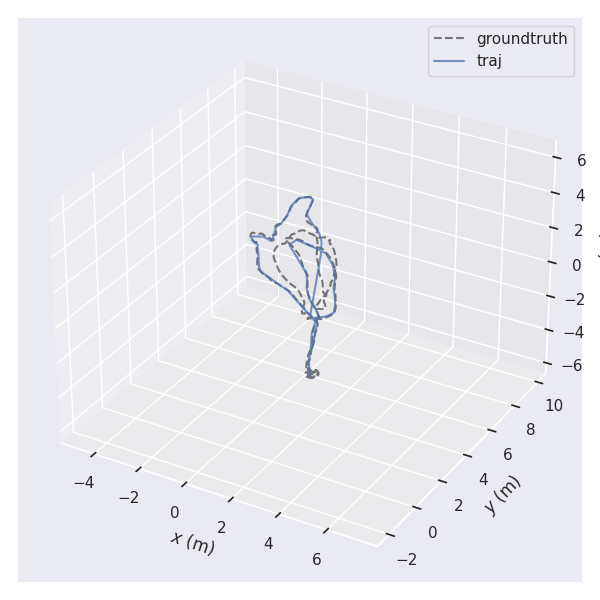
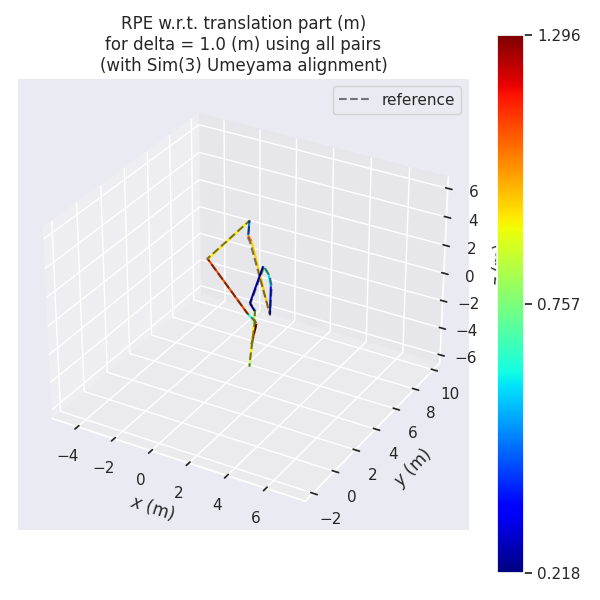
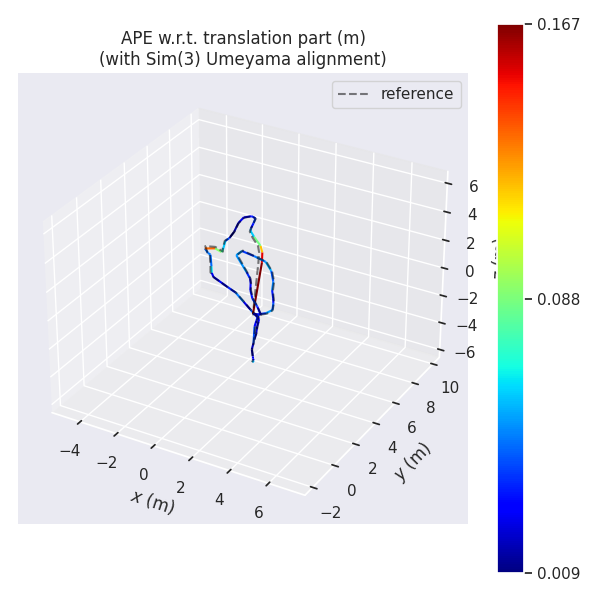
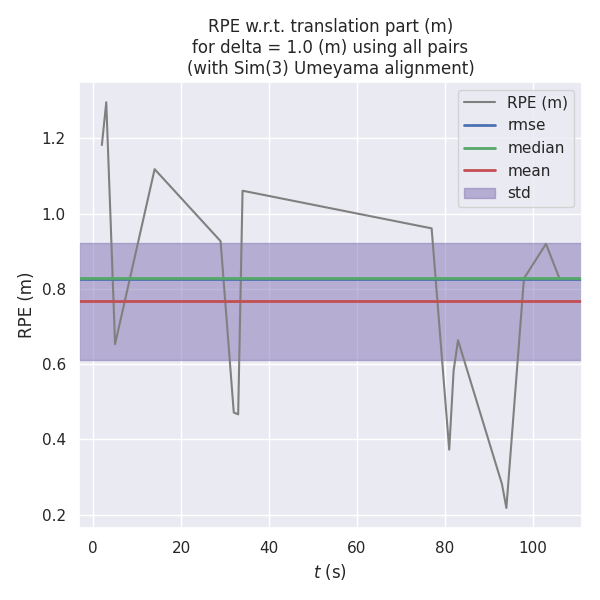
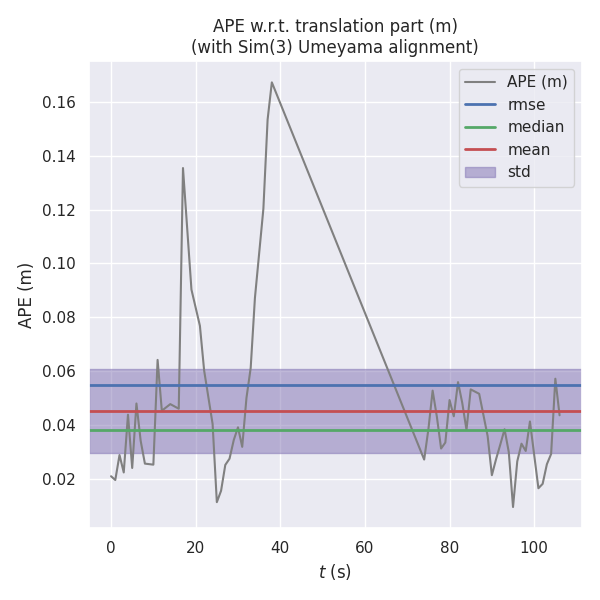
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.0547974964472411 | 0.045221019867939576 | 0.03826773012467685 | 0.03094874761583763 | 0.009497527920673354 | 0.16723506562999862 | 0.18617146824689487 |
| RPE | 0.8274898145515345 | 0.7672827143233825 | 0.8288952691987954 | 0.3098655022539223 | 0.2180444575450798 | 1.2960307529859152 | 12.325309077357593 |
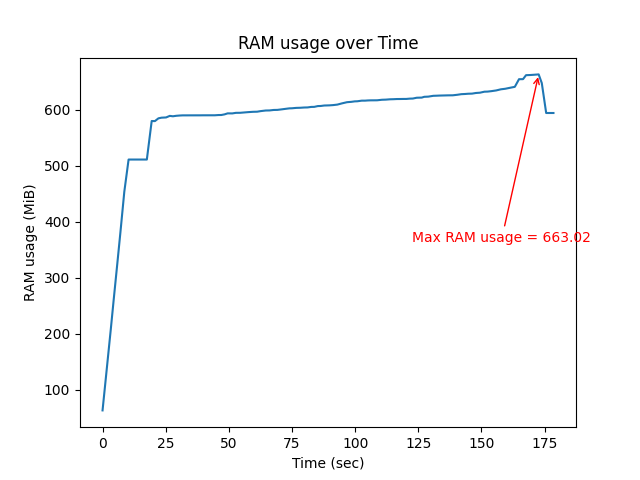
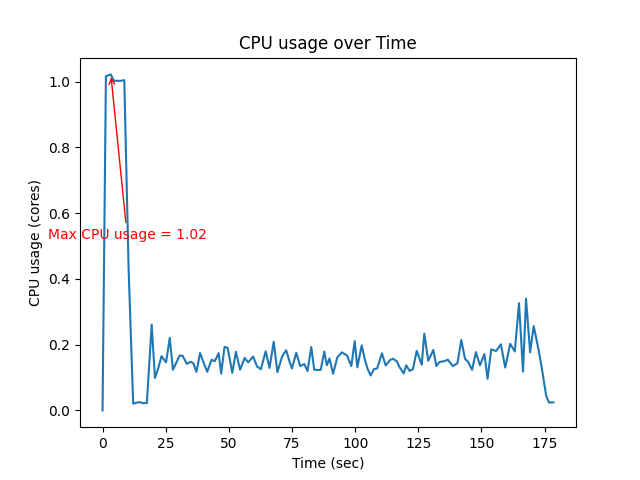
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.021820884898279 | 0.19168907277283698 | 663.01953125 |