Wiki Link
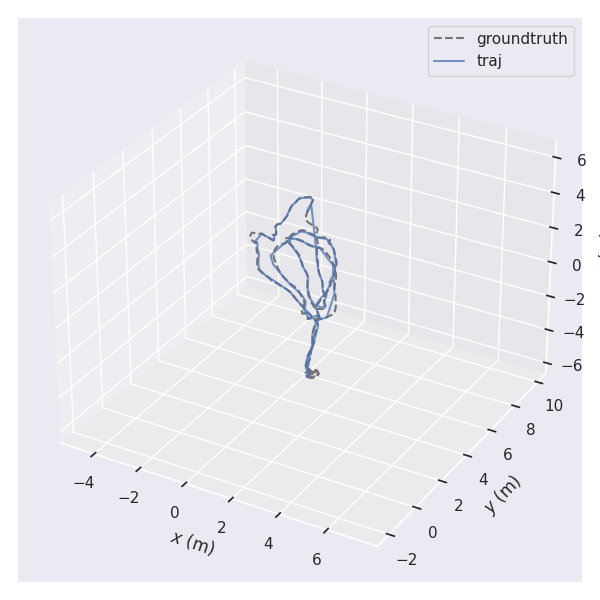
orb-slam3-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 2 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | newWidth | 480 |
| dataset-parameters | newHeight | 280 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-resolution | /cam0/image_raw | 0.8 |
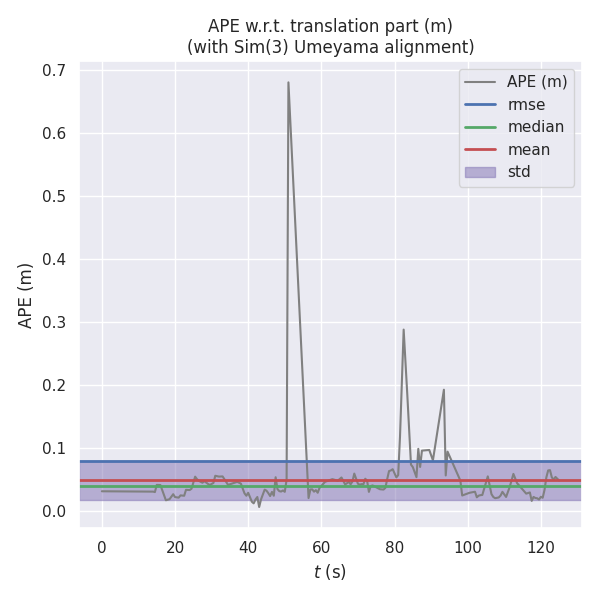
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
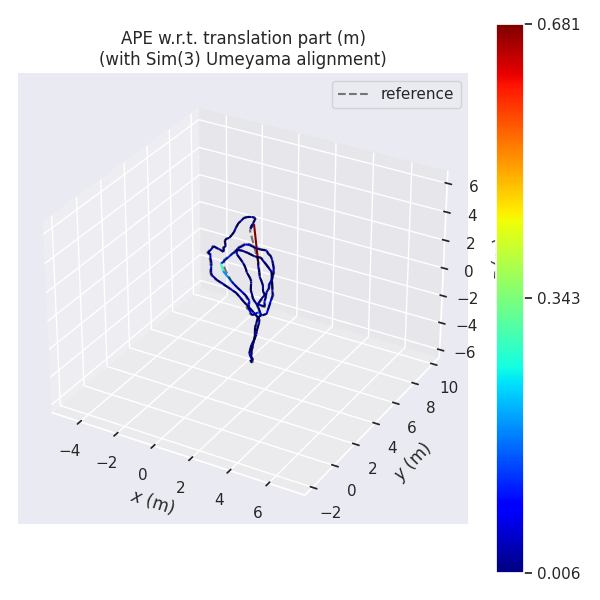
| ATE | 0.07888127816303742 | 0.04822078718046595 | 0.0384888569641754 | 0.062426050077917745 | 0.005813530389132863 | 0.6805927548787918 | 0.8835603583380965 |
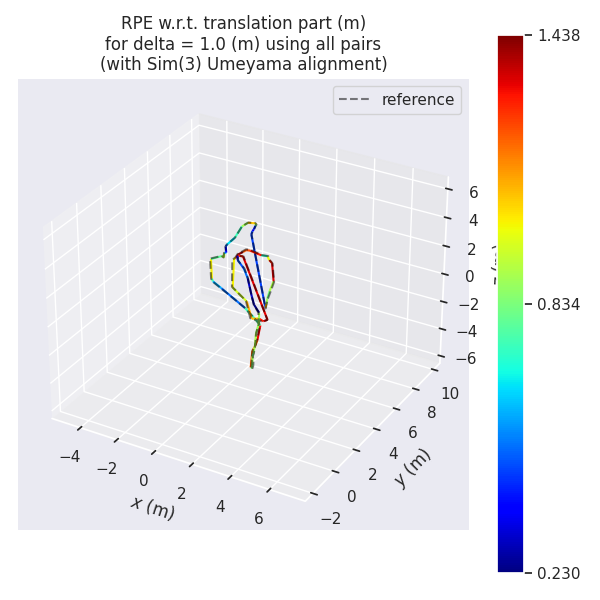
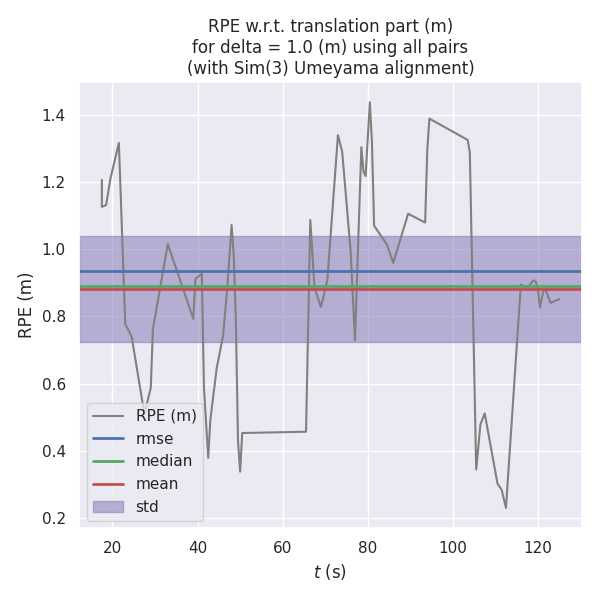
| RPE | 0.9357711338187266 | 0.8813578424893136 | 0.8922144789149317 | 0.3144454934817282 | 0.2299238787954561 | 1.4379135775343141 | 56.042727352856645 |
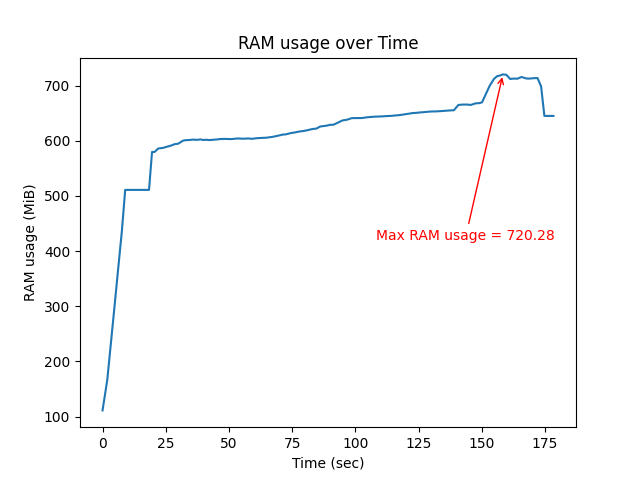
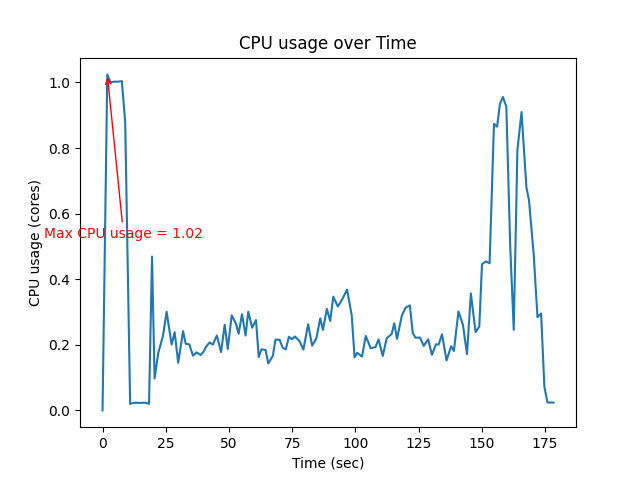
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0245861414485338 | 0.30273431993089955 | 720.27734375 |