Wiki Link
orb-slam3-ros-mono with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 2 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | newWidth | 480 |
| dataset-parameters | newHeight | 280 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-resolution | /cam0/image_raw | 0.8 |
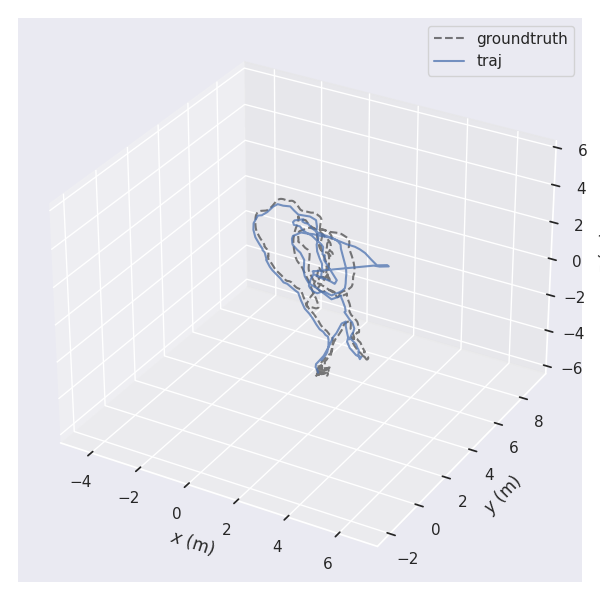
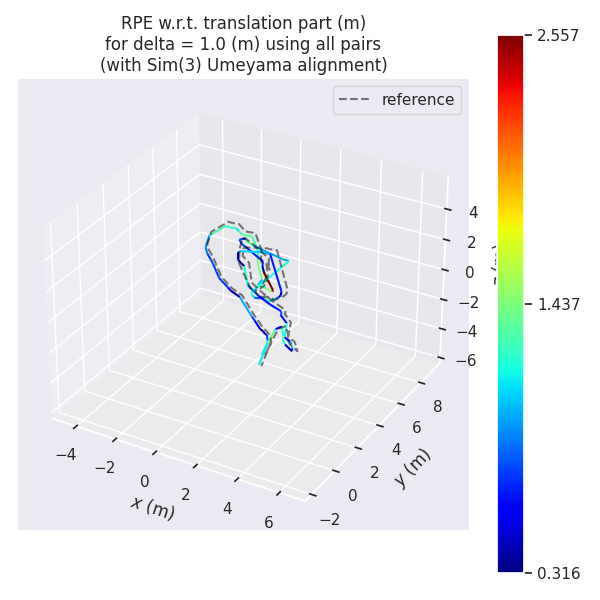
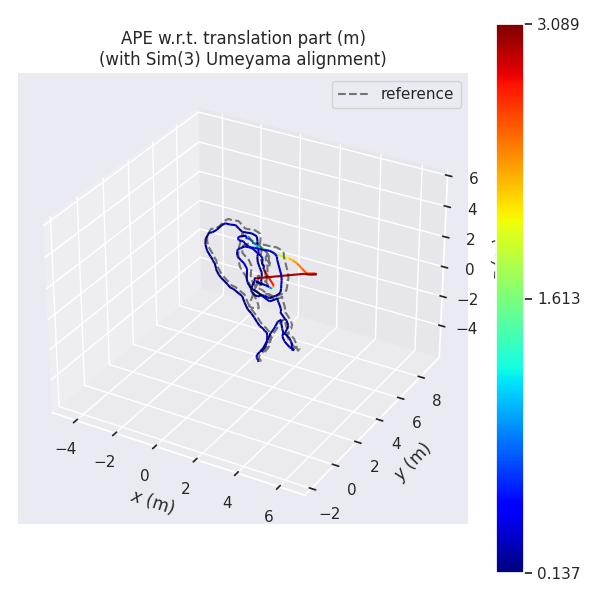
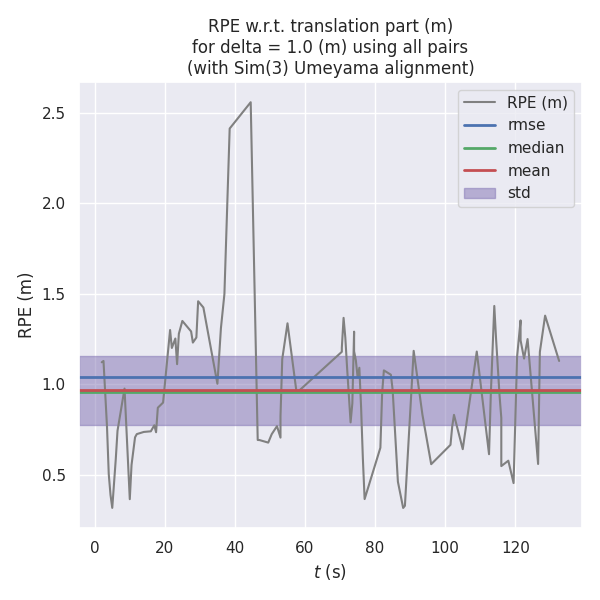
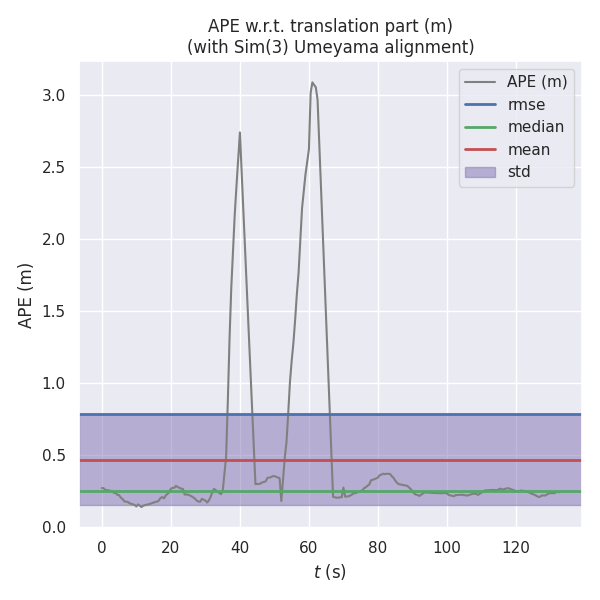
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.7868540999783036 | 0.4655996103810758 | 0.2463141154257662 | 0.6343156765094623 | 0.13744169183156477 | 3.0892097409347476 | 117.01734180935392 |
| RPE | 1.0374214190533704 | 0.9659003416268538 | 0.9585067542226966 | 0.37852309144335594 | 0.316199241214858 | 2.556903962887438 | 102.24310406751731 |
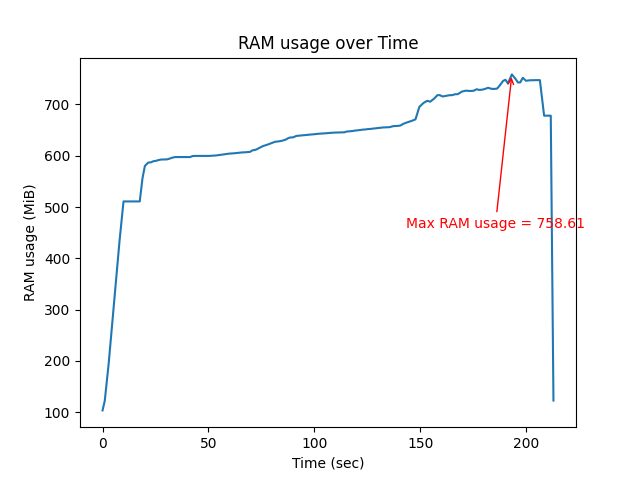
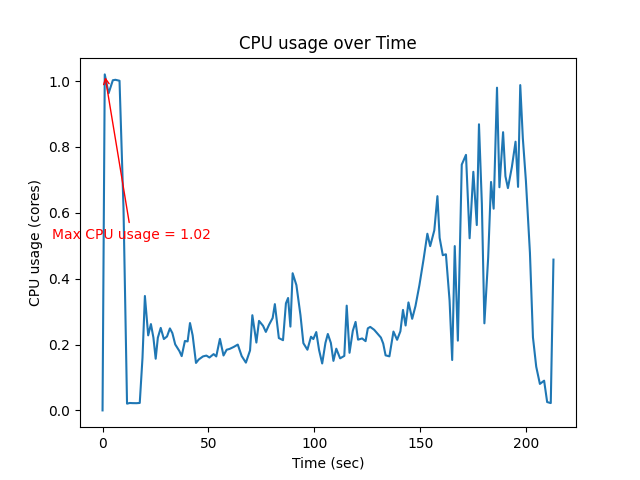
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0204078697375156 | 0.3376075573488593 | 758.60546875 |