Wiki Link
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-parameters | Camera_height | 240 |
| dataset-parameters | Camera_width | 376 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 183.6075 |
| dataset-parameters | cy | 124.1875 |
| dataset-parameters | fps | 1.0 |
| dataset-parameters | fx | 229.327 |
| dataset-parameters | fy | 228.648 |
| dataset-parameters | image_frequency | 1 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.5 |
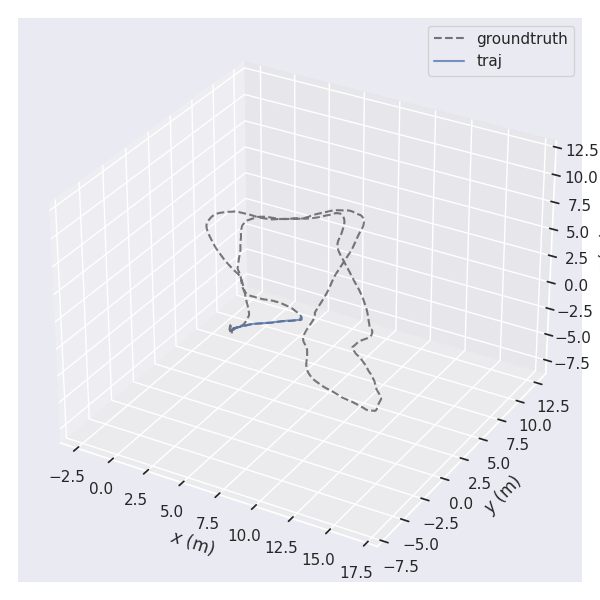
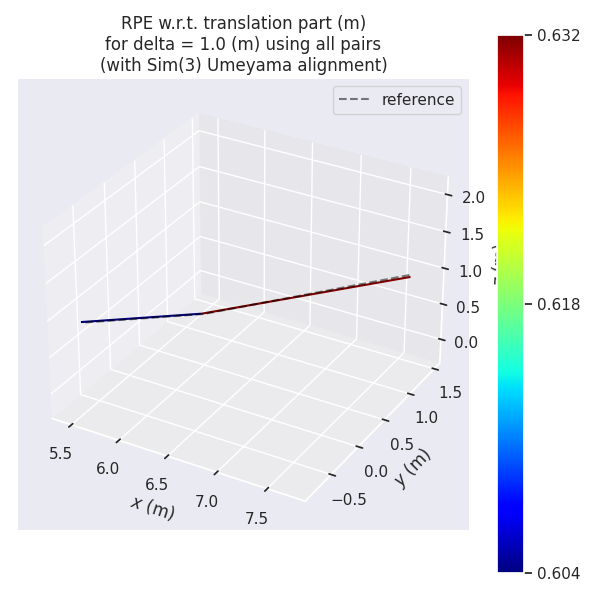
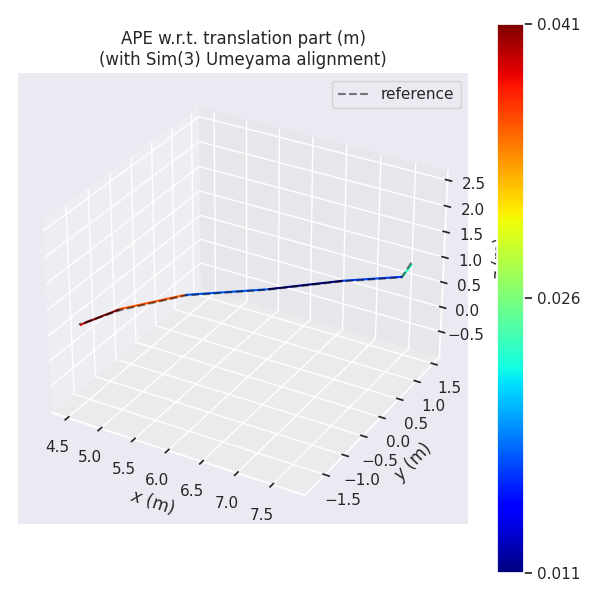
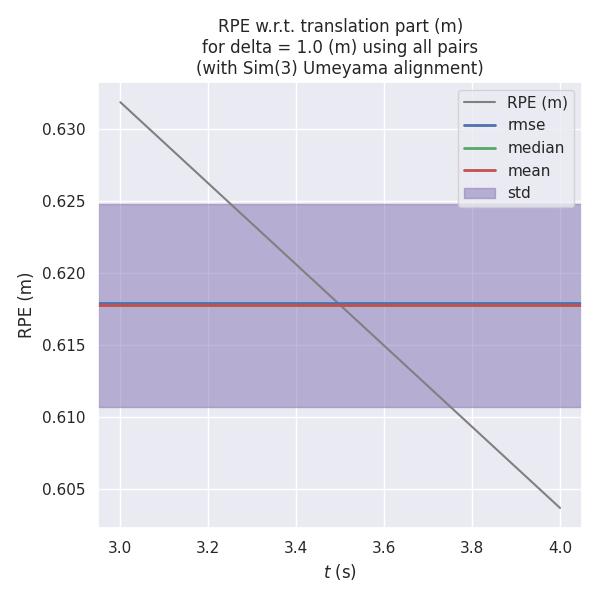
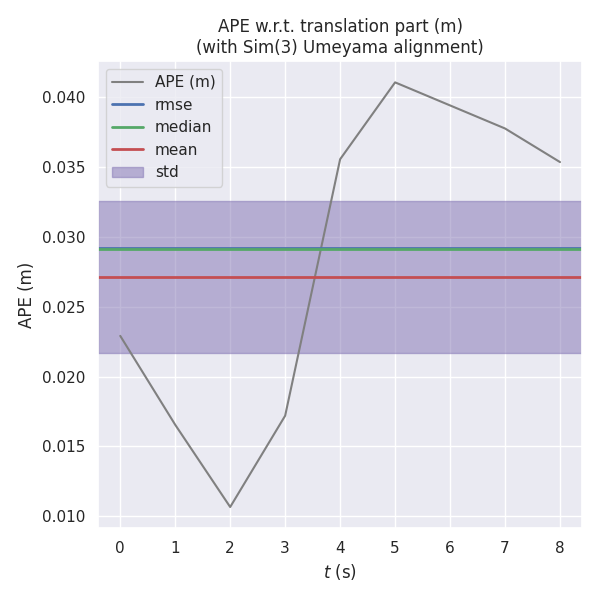
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.029219207242889685 | 0.027126091038734354 | 0.02912632199748819 | 0.01085989212014709 | 0.010671690299703487 | 0.04104204917903489 | 0.0068300965752234955 |
| RPE | 0.617909229342488 | 0.6177487918621016 | 0.6177487918621016 | 0.014079980807563452 | 0.6036688110545382 | 0.6318287726696651 | 0.7636236314132551 |
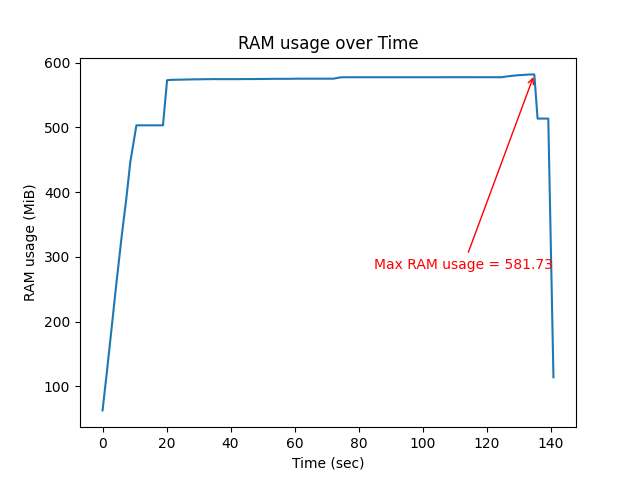
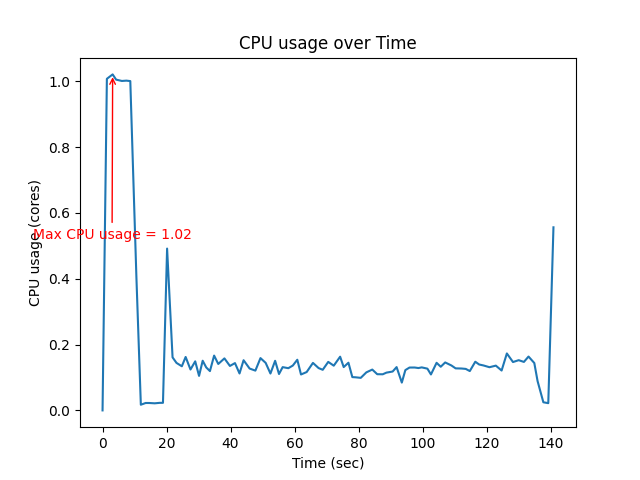
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0208498965268906 | 0.18790728107937377 | 581.73046875 |