Wiki Link
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-parameters | Camera_height | 384 |
| dataset-parameters | Camera_width | 601 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | fps | 1.0 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | image_frequency | 1 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.8 |
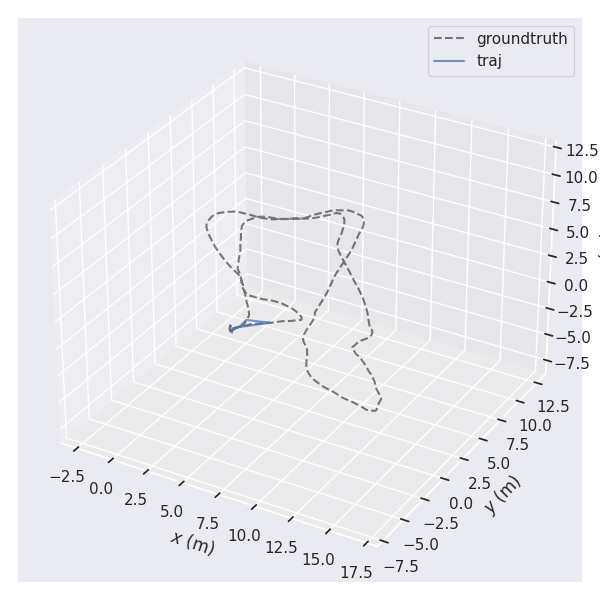
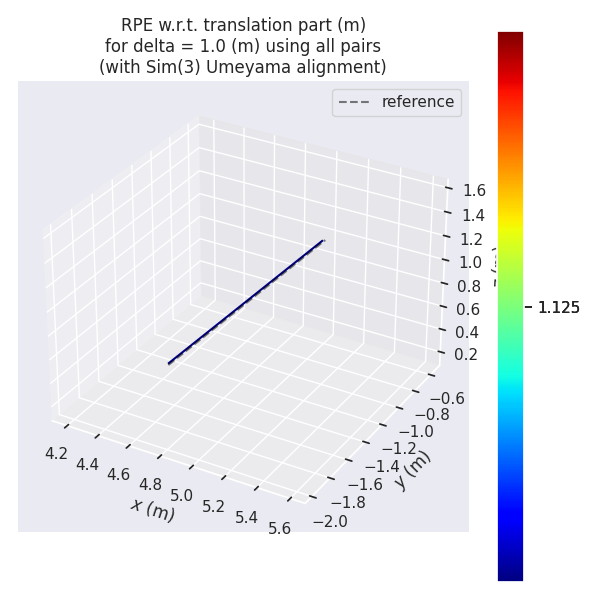
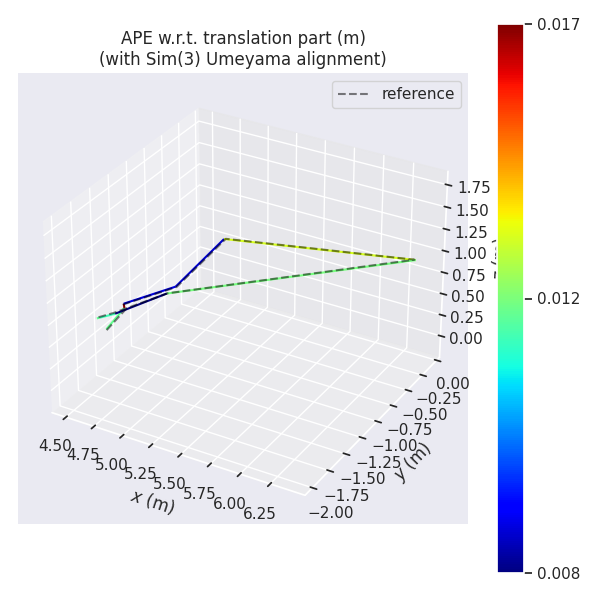
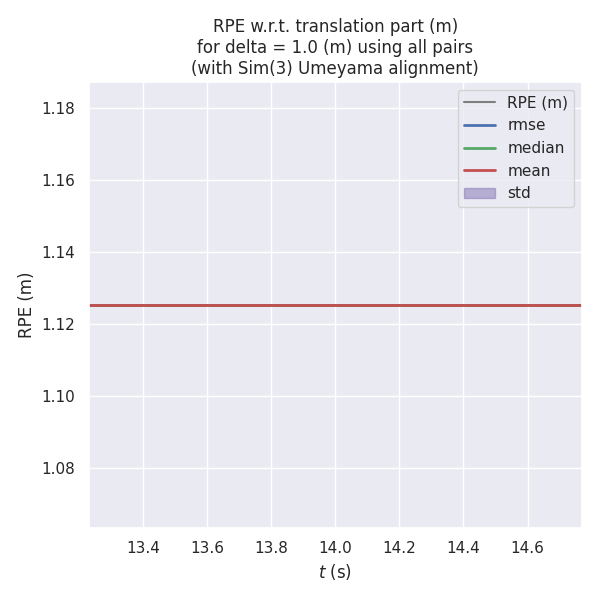
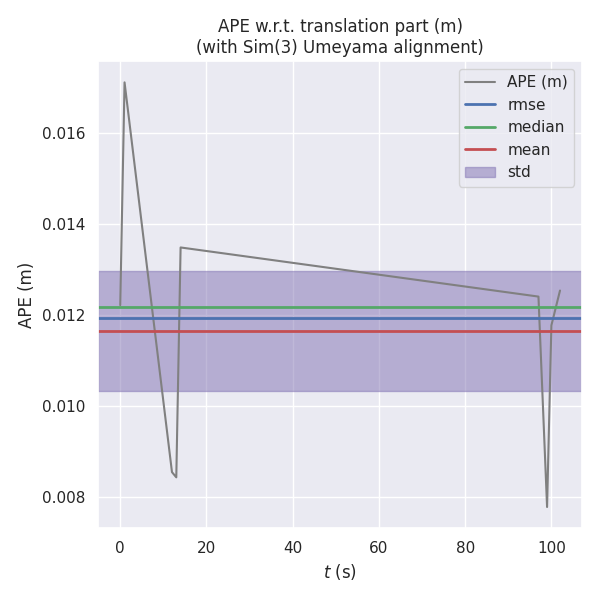
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.011941471731740597 | 0.011645268337473662 | 0.012185807690390396 | 0.002643193611560299 | 0.0077879285778721516 | 0.01710391735226819 | 0.0014259874711995979 |
| RPE | 1.1252149771514561 | 1.1252149771514561 | 1.1252149771514561 | 0.0 | 1.1252149771514561 | 1.1252149771514561 | 1.266108744805952 |
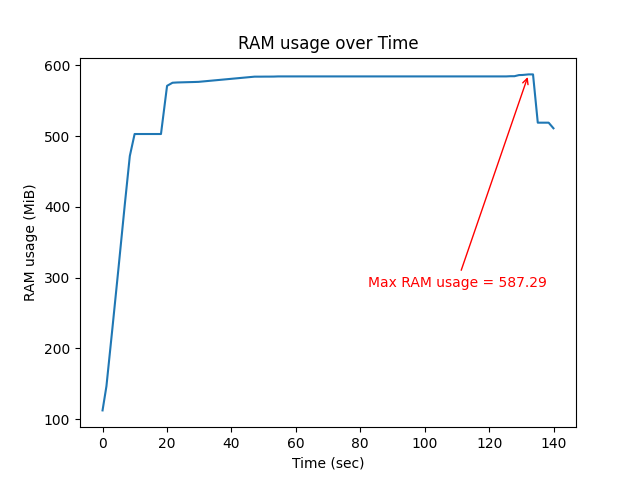
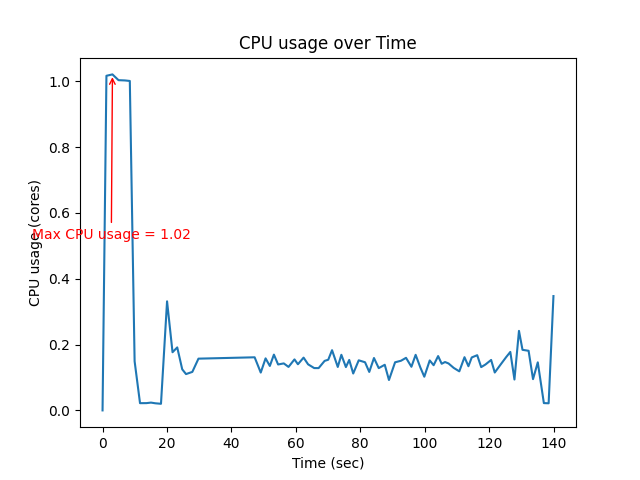
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0208267166763147 | 0.18960186164517 | 587.2890625 |