Wiki Link
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-parameters | Camera_height | 240 |
| dataset-parameters | Camera_width | 376 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 183.6075 |
| dataset-parameters | cy | 124.1875 |
| dataset-parameters | fps | 5.0 |
| dataset-parameters | fx | 229.327 |
| dataset-parameters | fy | 228.648 |
| dataset-parameters | image_frequency | 5 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.5 |
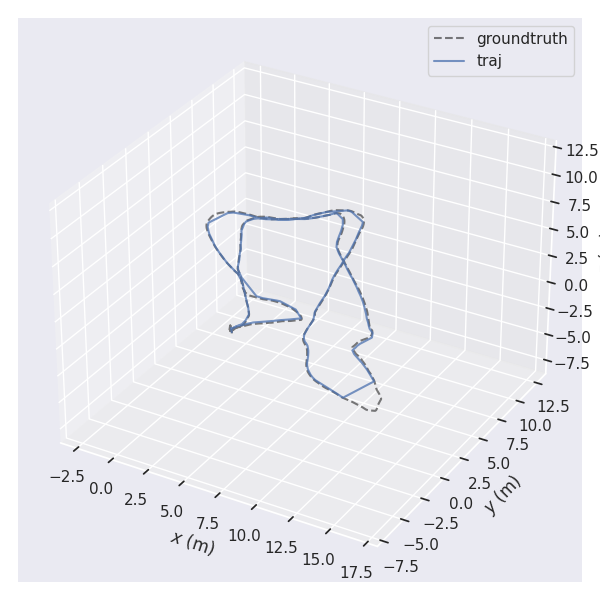
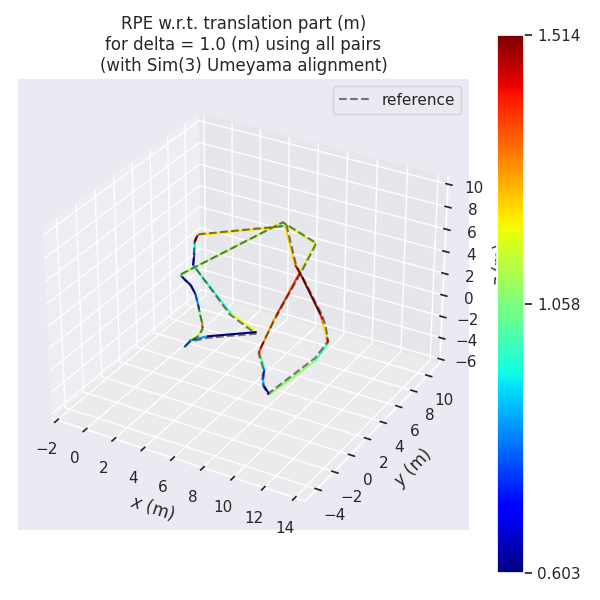
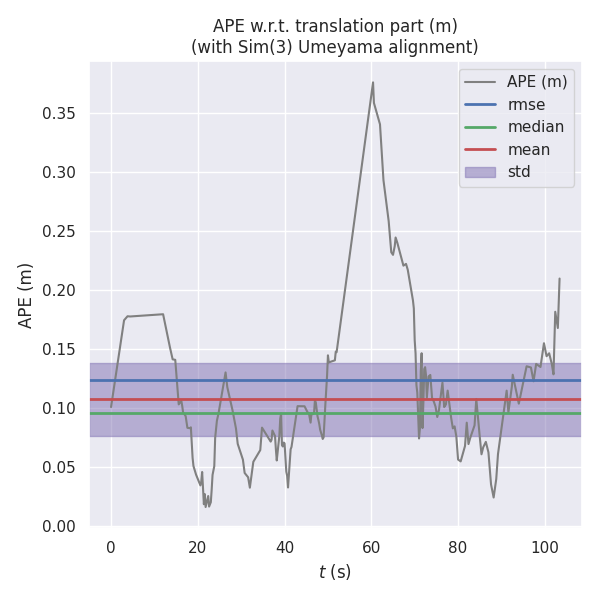
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
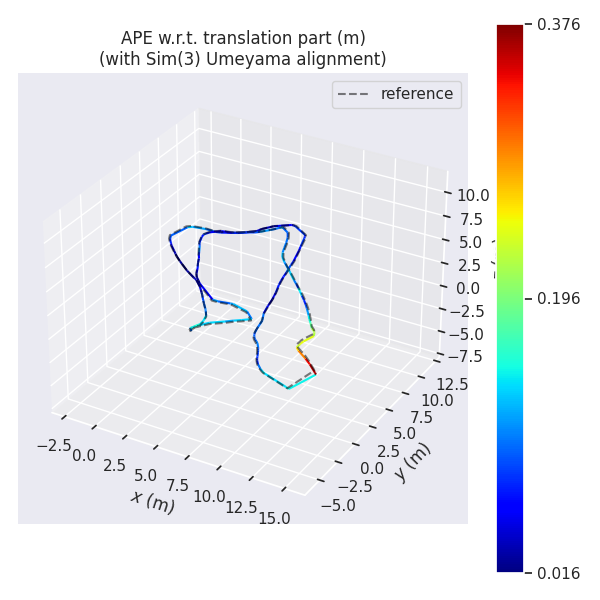
| ATE | 0.12391690751371812 | 0.10747949311415021 | 0.09548913111939557 | 0.061672996746458715 | 0.01597658257223075 | 0.37636942852197636 | 2.6104179945197727 |
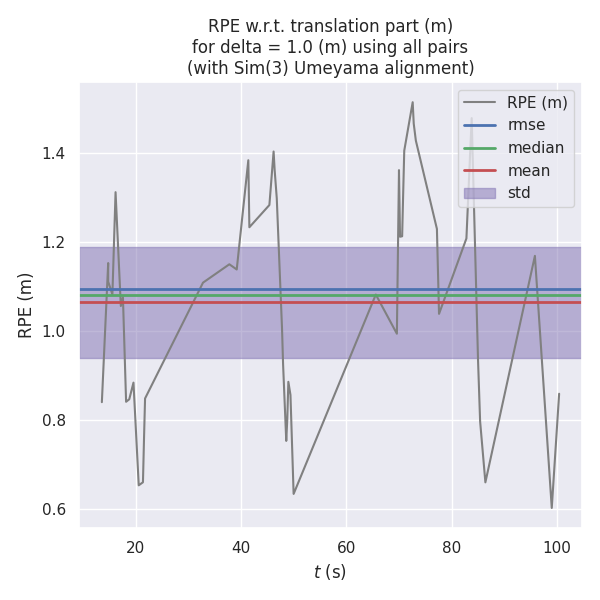
| RPE | 1.093526590915865 | 1.0646646575827907 | 1.082017636068922 | 0.24957878903102362 | 0.6026511037009241 | 1.5140359020404601 | 60.985820657043746 |
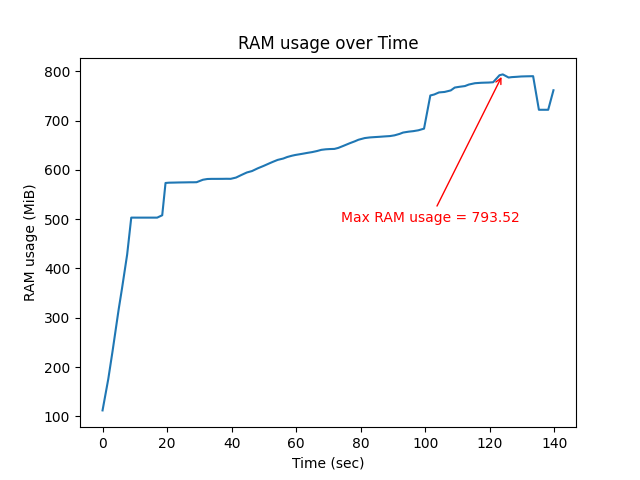
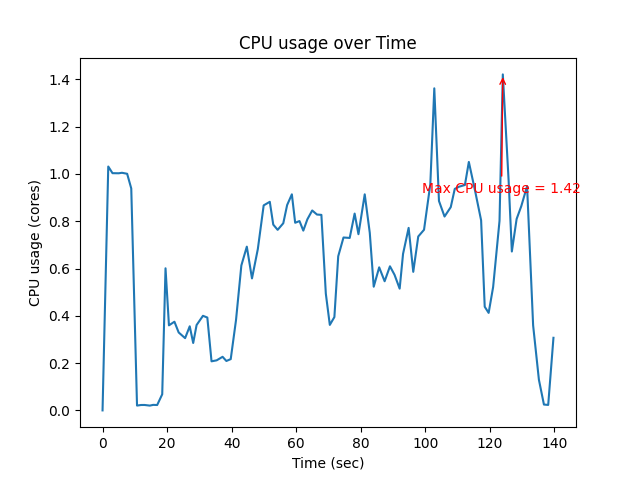
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.4208694153805208 | 0.6124853385033666 | 793.51953125 |