Wiki Link
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-parameters | Camera_height | 288 |
| dataset-parameters | Camera_width | 451 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | fps | 5.0 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | image_frequency | 5 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.6 |
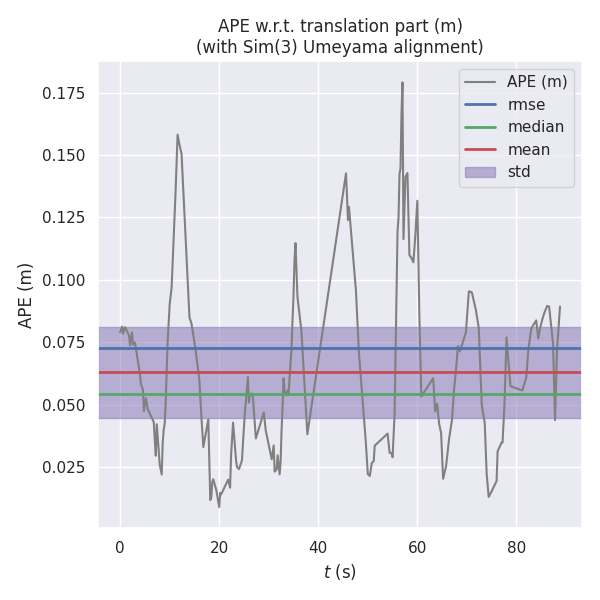
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
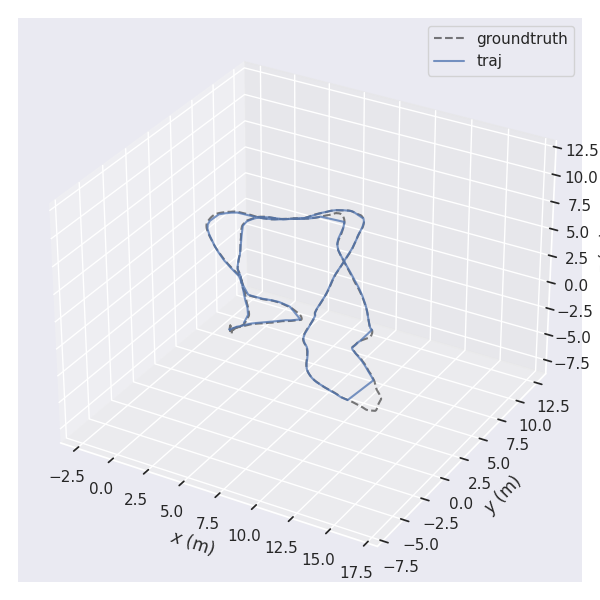
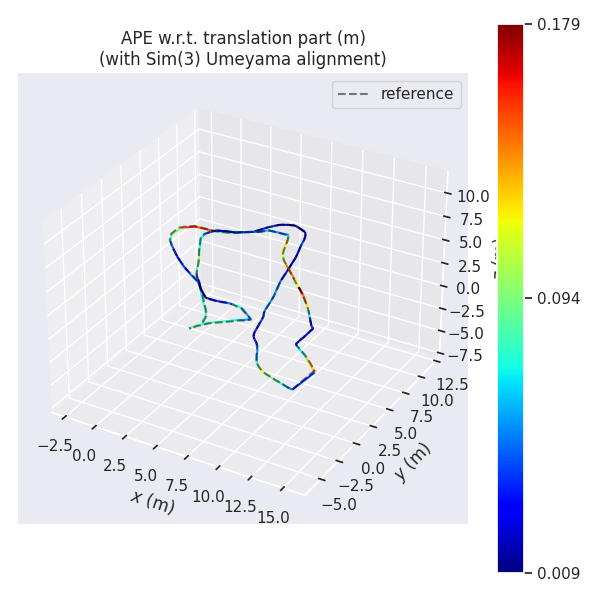
| ATE | 0.0726895220391209 | 0.06288275804658243 | 0.05425674409209884 | 0.03646265698945724 | 0.008948583798831712 | 0.17913140565829128 | 0.8982403244268932 |
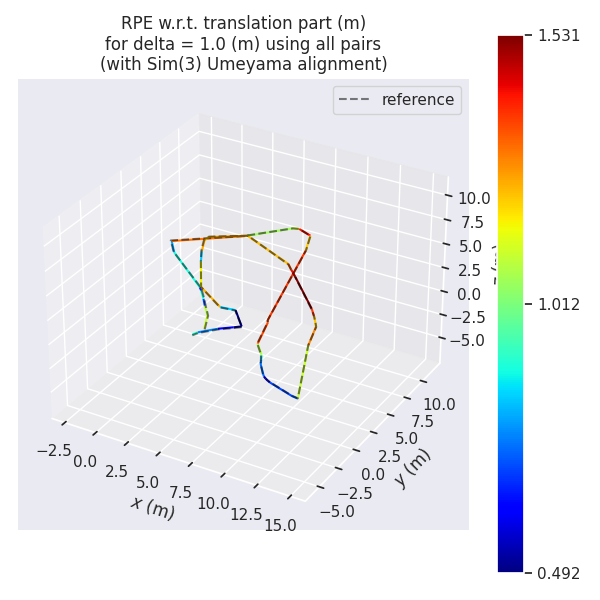
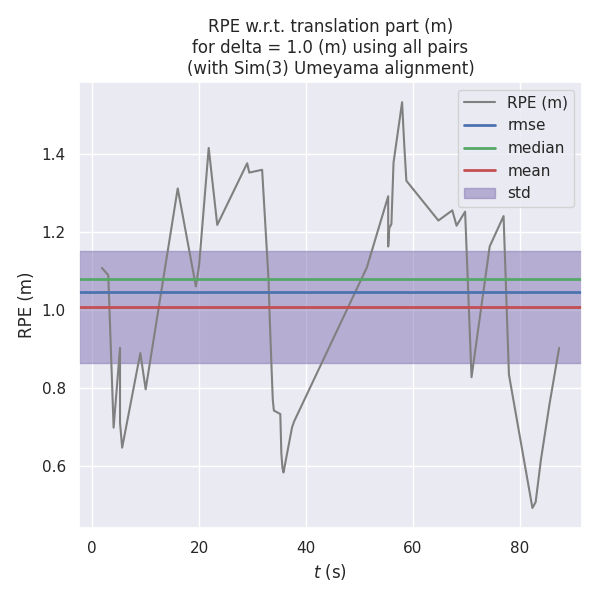
| RPE | 1.04672975531615 | 1.0071762472285886 | 1.0775633333246994 | 0.2850248895846543 | 0.4924895601400273 | 1.5313691533718008 | 53.686515852546165 |
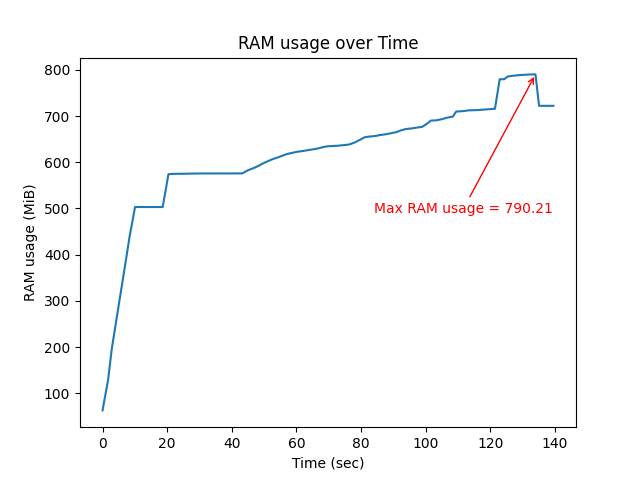
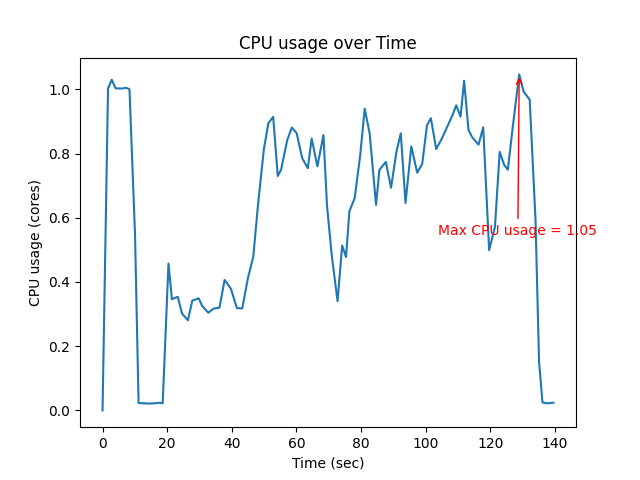
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.04632325025606 | 0.6258875987727311 | 790.20703125 |