Wiki Link
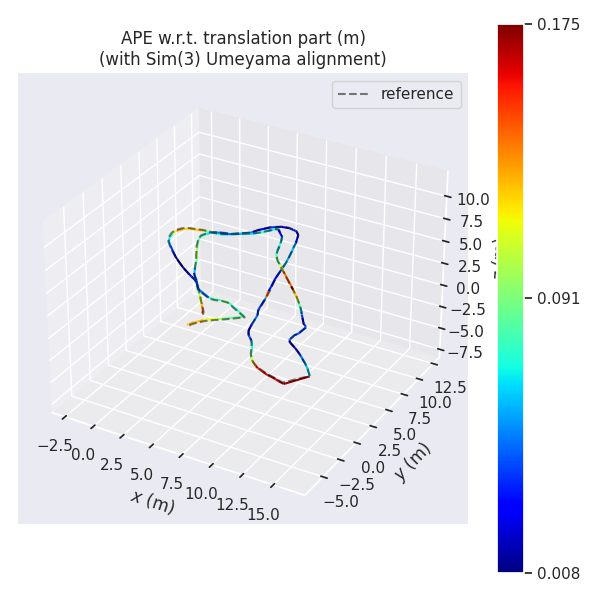
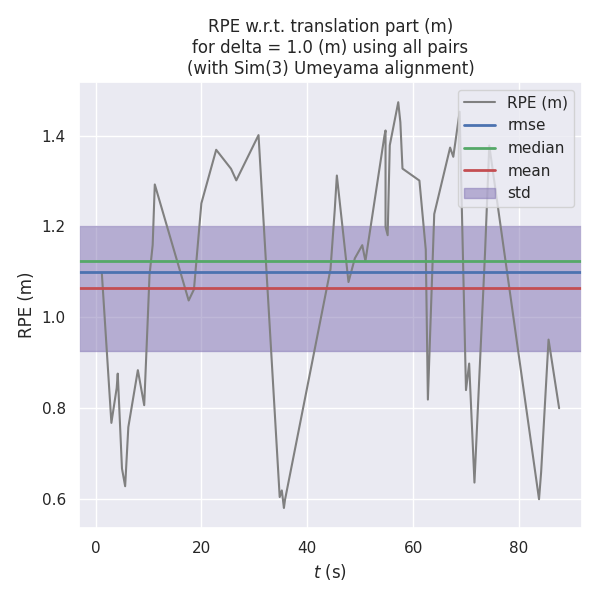
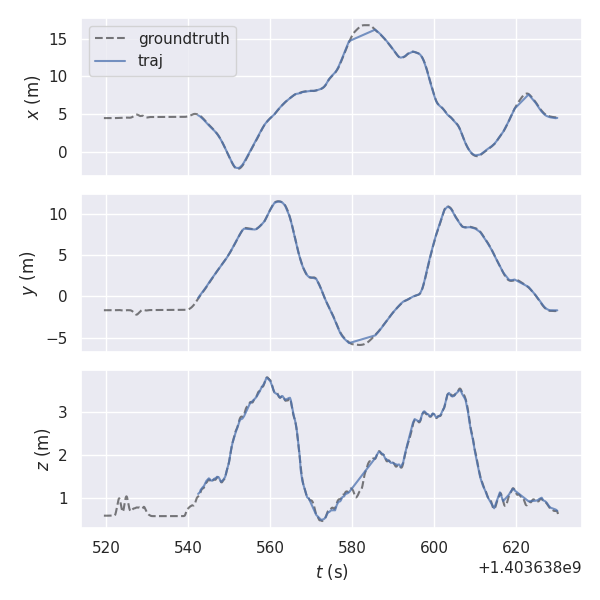

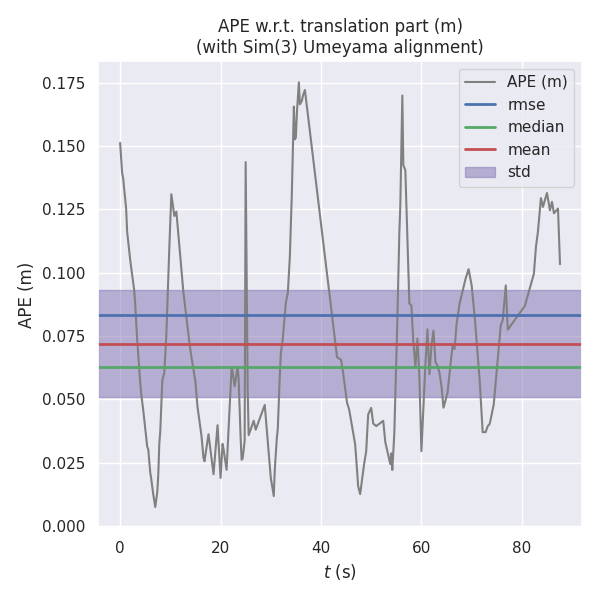
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-parameters | Camera_height | 384 |
| dataset-parameters | Camera_width | 601 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | fps | 5.0 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | image_frequency | 5 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.8 |
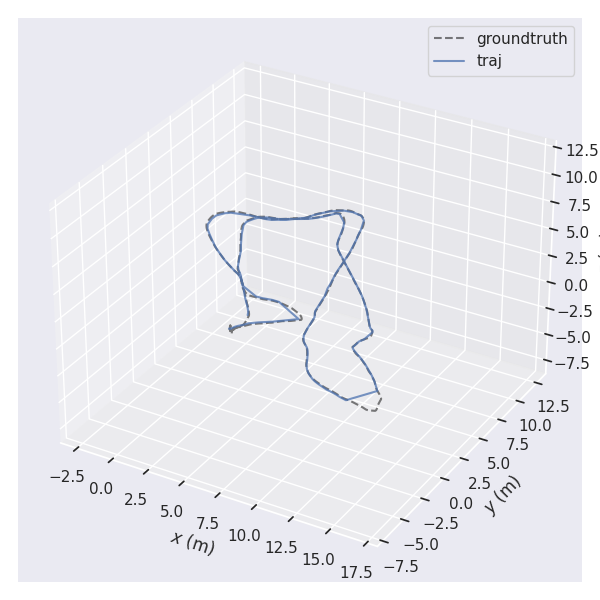
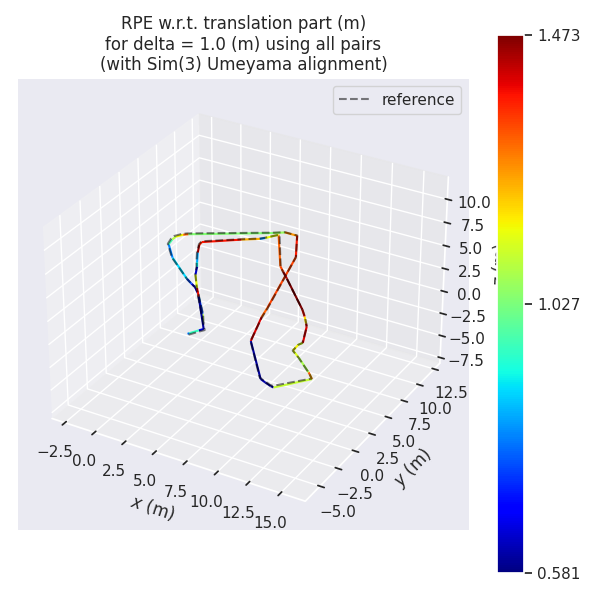
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.08343827540678037 | 0.07195062199689897 | 0.06273899019430006 | 0.04224989700717728 | 0.007553888382924708 | 0.17506324407459323 | 1.1417591116686676 |
| RPE | 1.0990720769650106 | 1.0641376936839482 | 1.1239532617769326 | 0.2749007079750601 | 0.5808287182894931 | 1.4732299481119882 | 66.43776867003001 |
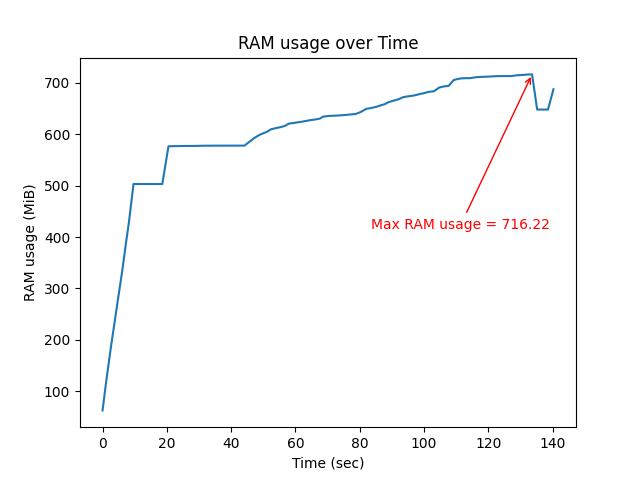
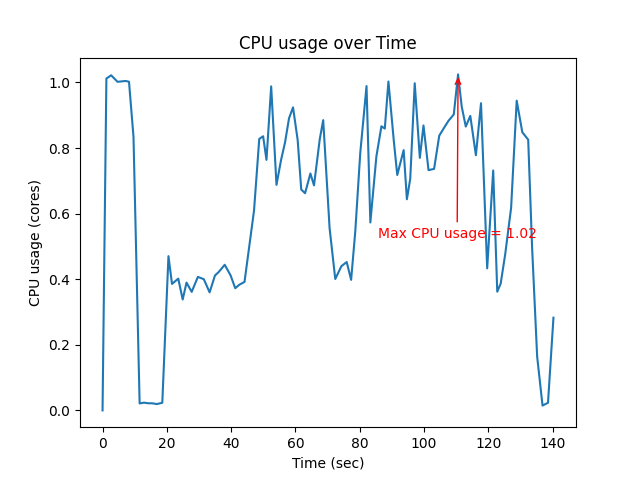
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.024509034505035 | 0.6245219599048161 | 716.22265625 |