Wiki Link
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-parameters | Camera_height | 240 |
| dataset-parameters | Camera_width | 376 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 183.6075 |
| dataset-parameters | cy | 124.1875 |
| dataset-parameters | fps | 10.0 |
| dataset-parameters | fx | 229.327 |
| dataset-parameters | fy | 228.648 |
| dataset-parameters | image_frequency | 10 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.5 |
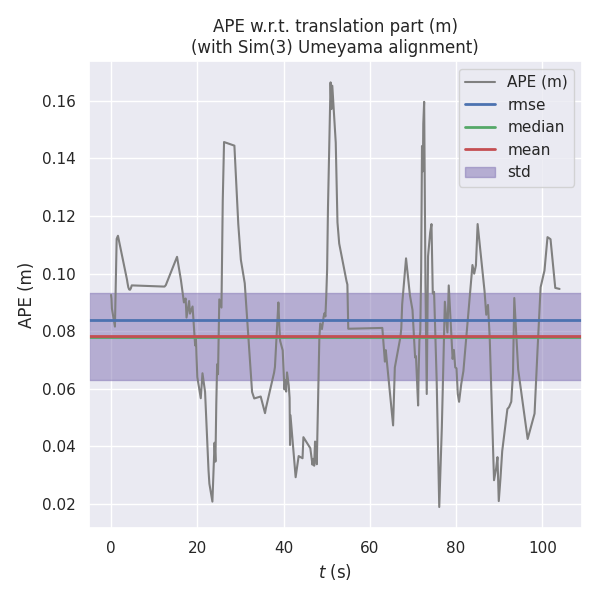
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
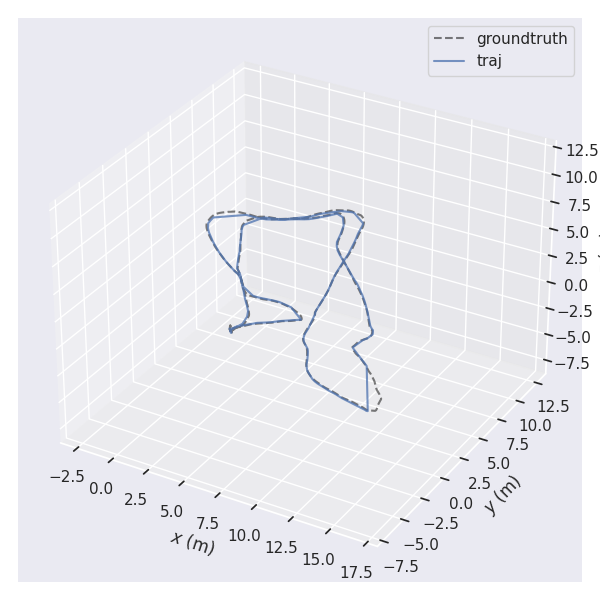
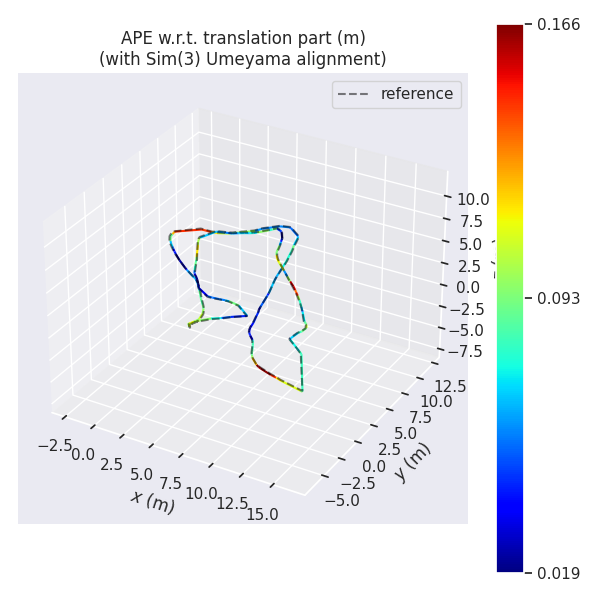
| ATE | 0.08387975627111258 | 0.07816872790286063 | 0.07789592166476009 | 0.03042143142834975 | 0.01897309631479285 | 0.16633920124184973 | 1.2101599240814147 |
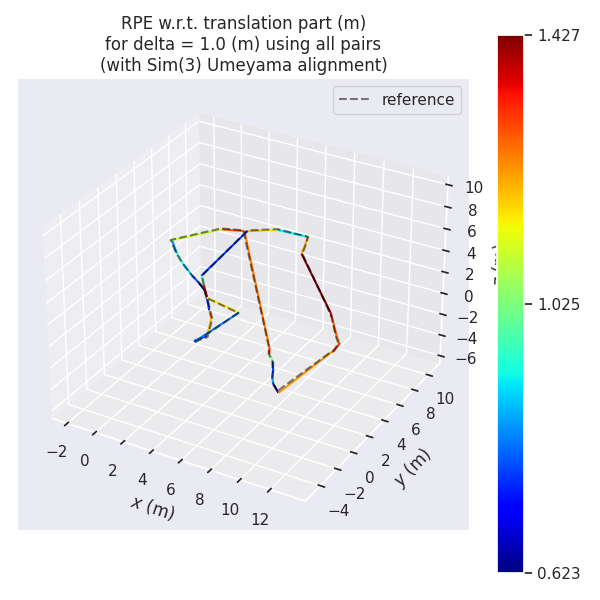
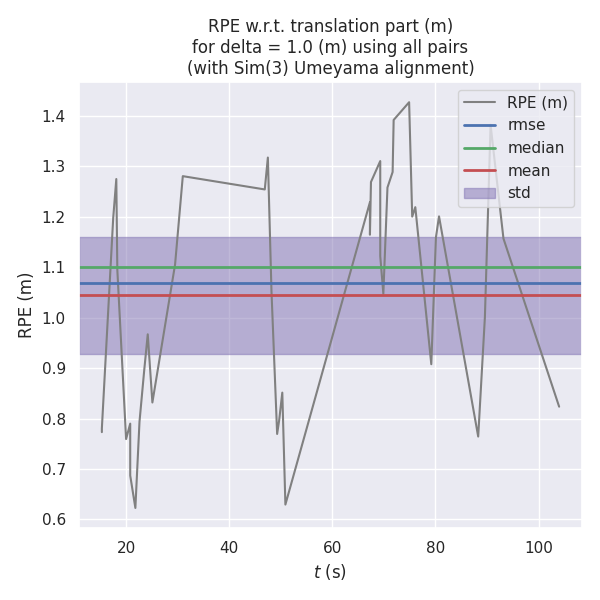
| RPE | 1.0690206752711526 | 1.0437082425252562 | 1.099687021275824 | 0.231253775411413 | 0.6228439231471409 | 1.4265075632509039 | 47.997818574602036 |
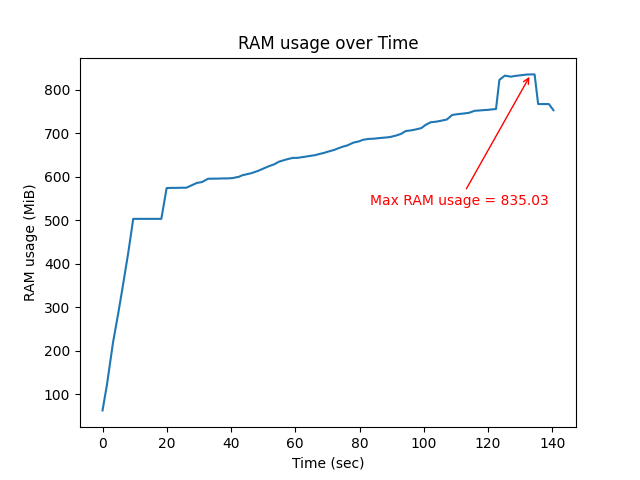
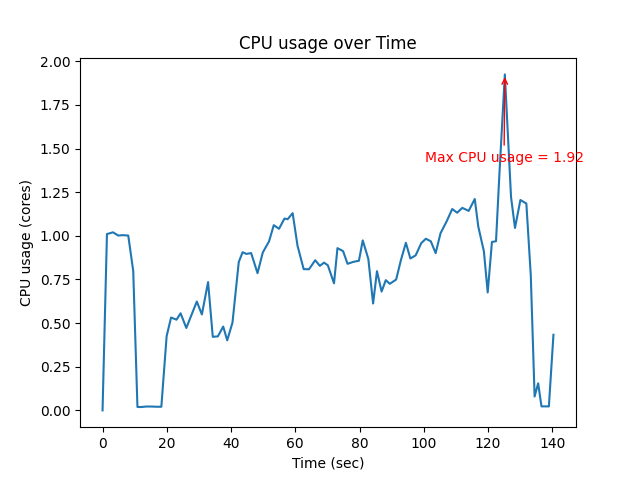
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.9246975028733488 | 0.7690023106601337 | 835.02734375 |