Wiki Link
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-parameters | Camera_height | 288 |
| dataset-parameters | Camera_width | 451 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | fps | 10.0 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | image_frequency | 10 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.6 |
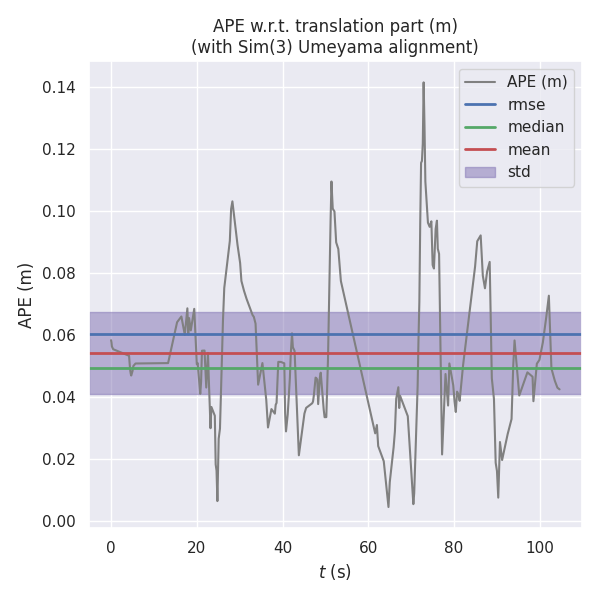
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
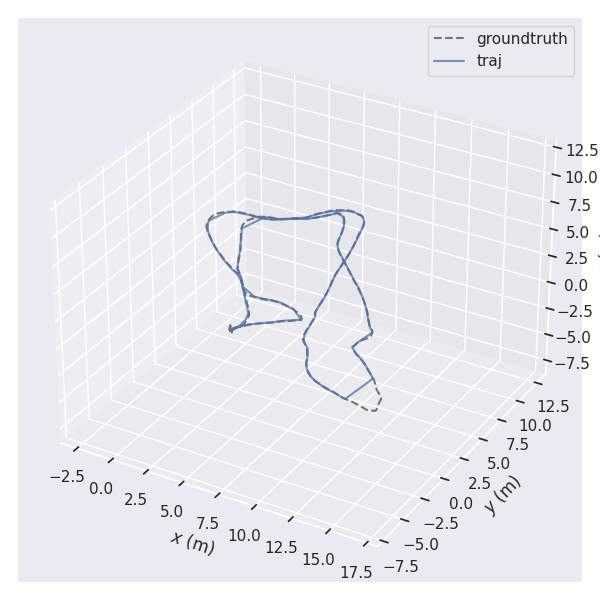
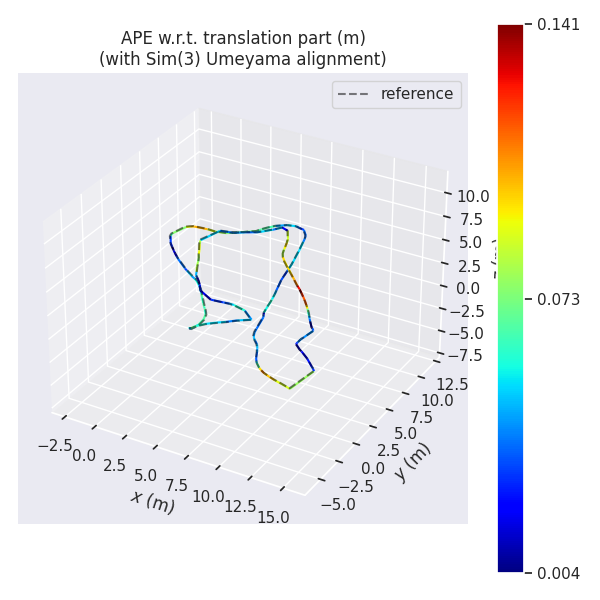
| ATE | 0.06016475361840891 | 0.054157655268728226 | 0.04935498934128309 | 0.02620583816170436 | 0.004488003967940082 | 0.14135514302852523 | 0.6370843737216372 |
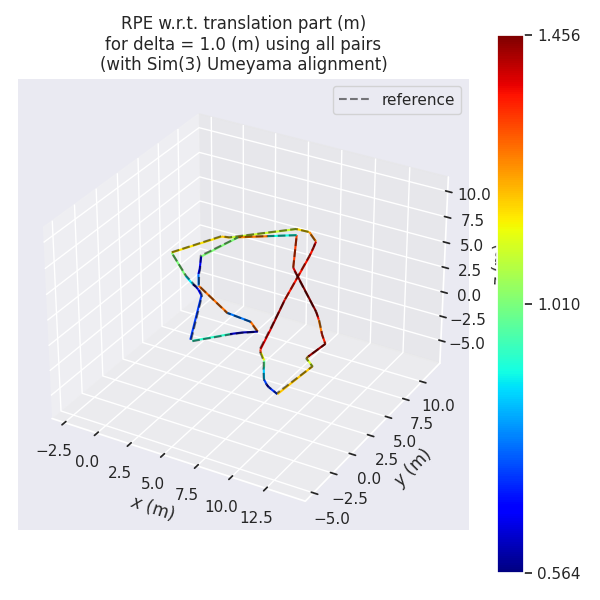
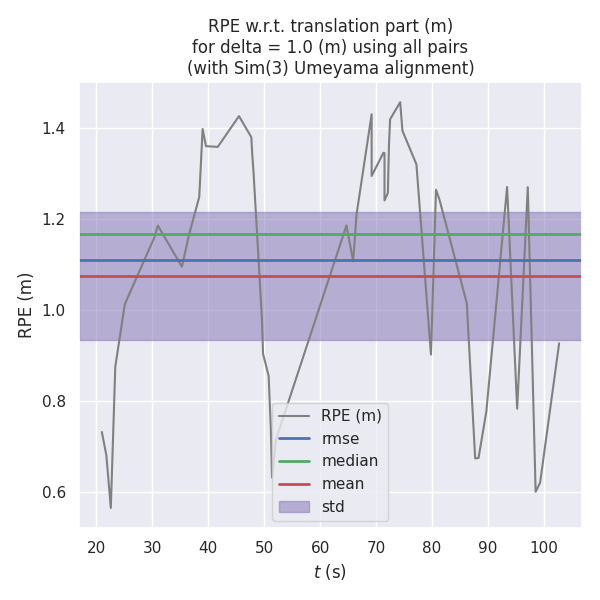
| RPE | 1.109920487932566 | 1.0741114393336566 | 1.165729157254653 | 0.2796571211770689 | 0.5640989566779488 | 1.45588858049493 | 65.29194494522065 |
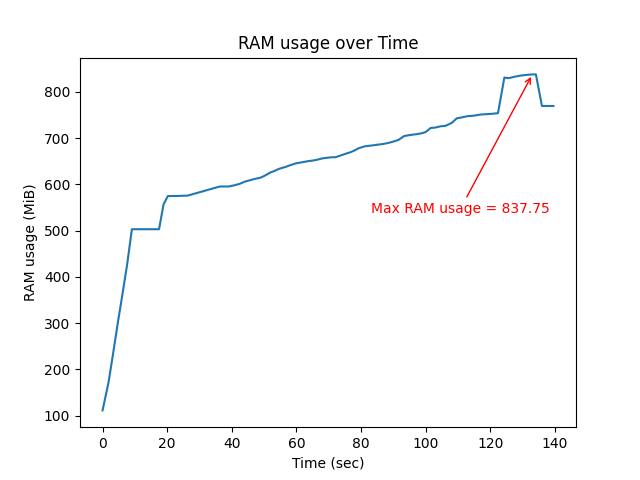
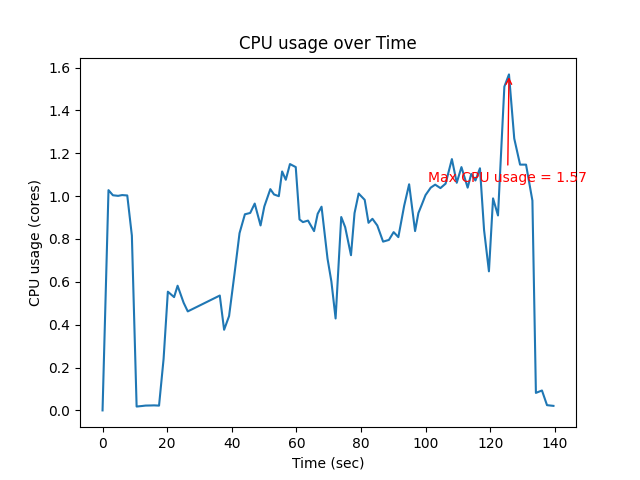
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.5678394183207194 | 0.7979791013836821 | 837.75 |