Wiki Link

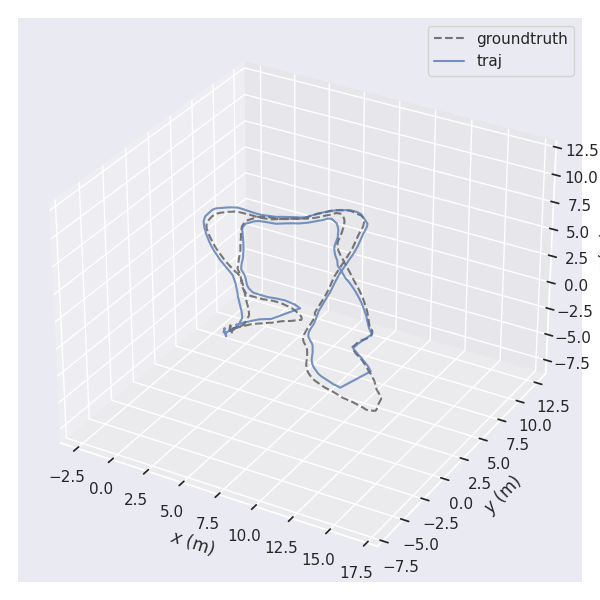

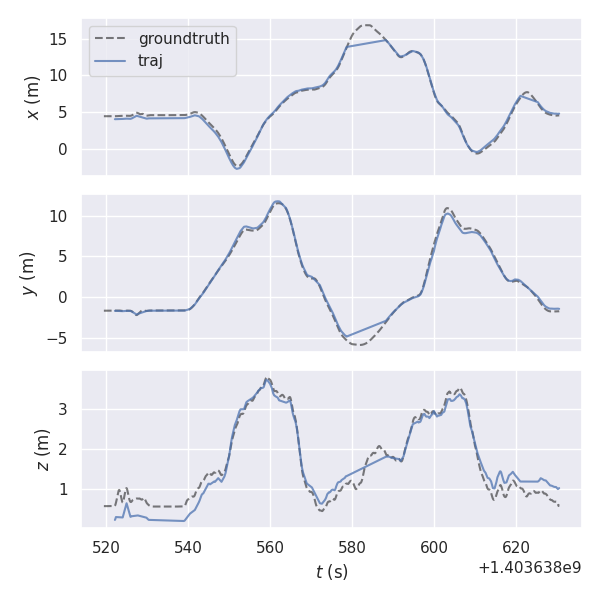
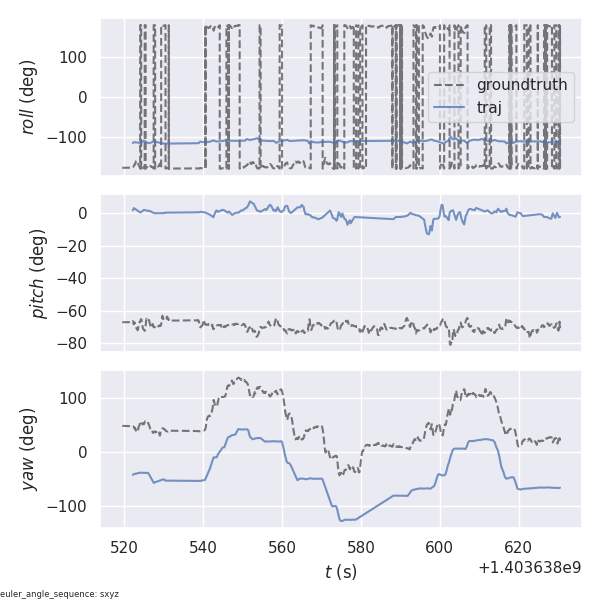
orb-slam2-ros-mono with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-parameters | Camera_height | 240 |
| dataset-parameters | Camera_width | 376 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 183.6075 |
| dataset-parameters | cy | 124.1875 |
| dataset-parameters | fps | 20.0 |
| dataset-parameters | fx | 229.327 |
| dataset-parameters | fy | 228.648 |
| dataset-parameters | image_frequency | 20 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.5 |
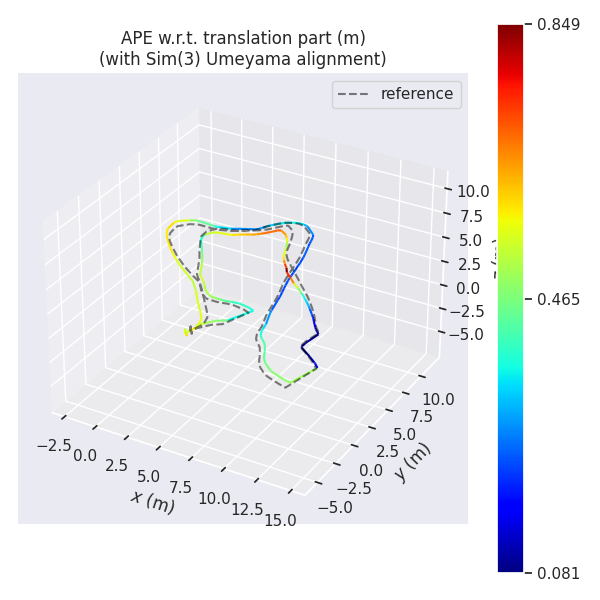
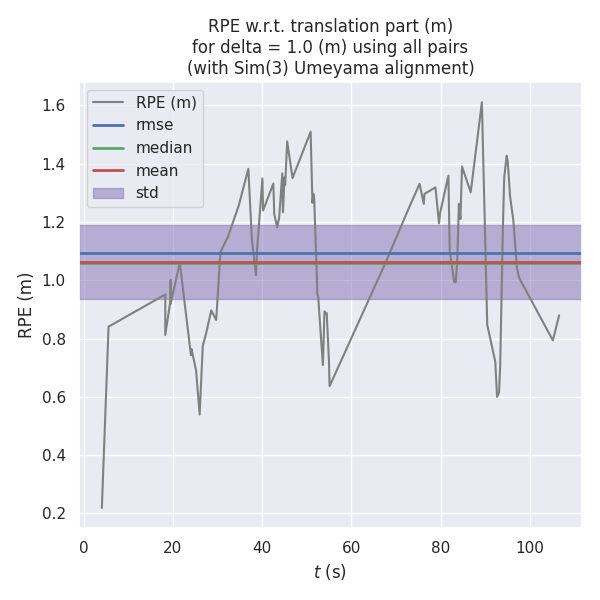
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
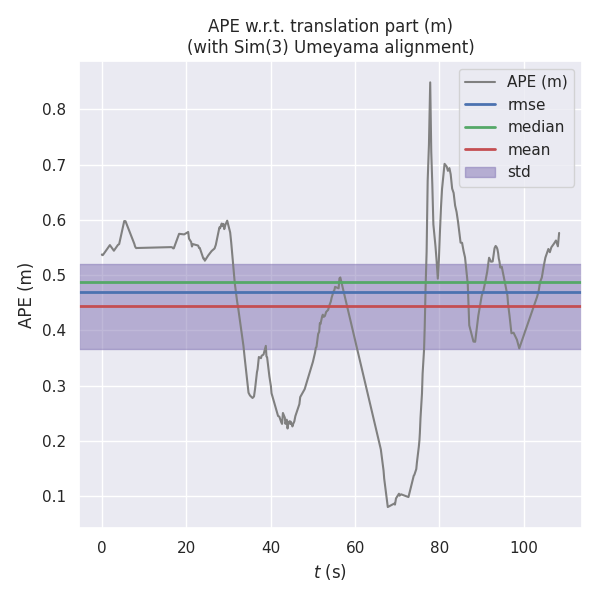
| ATE | 0.4695743668484521 | 0.44344476668547916 | 0.4868718526069959 | 0.1544565469651114 | 0.08056303504467023 | 0.8490047416258207 | 47.84851866224406 |
| RPE | 1.092899988672641 | 1.0626654630140595 | 1.0606495563565432 | 0.25528904981955863 | 0.21867269715453544 | 1.6109981767853918 | 106.30430428641864 |
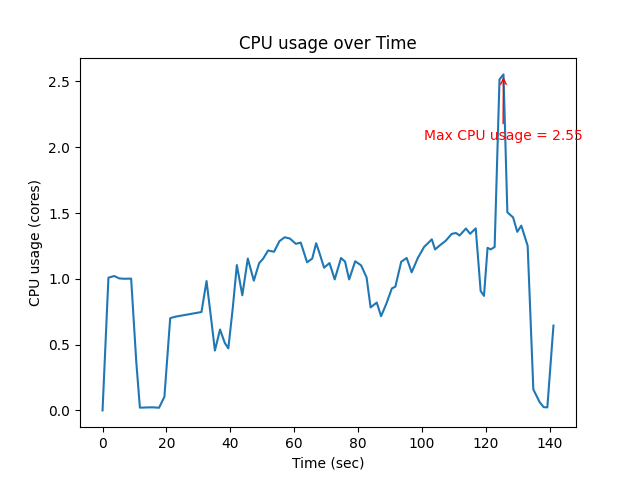
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 2.55341597562553 | 0.9734760320209375 | 891.13671875 |