Wiki Link
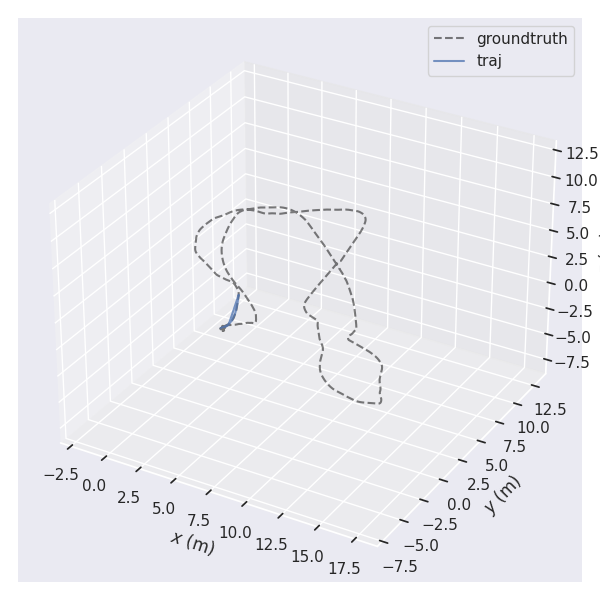
orb-slam2-ros-mono with MH_04_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-parameters | Camera_height | 480 |
| dataset-parameters | Camera_width | 752 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 367.215 |
| dataset-parameters | cy | 248.375 |
| dataset-parameters | fps | 1.0 |
| dataset-parameters | fx | 458.654 |
| dataset-parameters | fy | 457.296 |
| dataset-parameters | image_frequency | 1 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 1.0 |
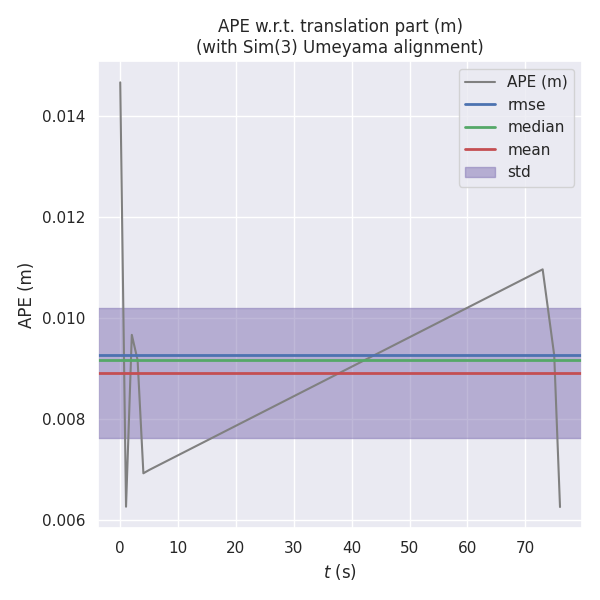
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
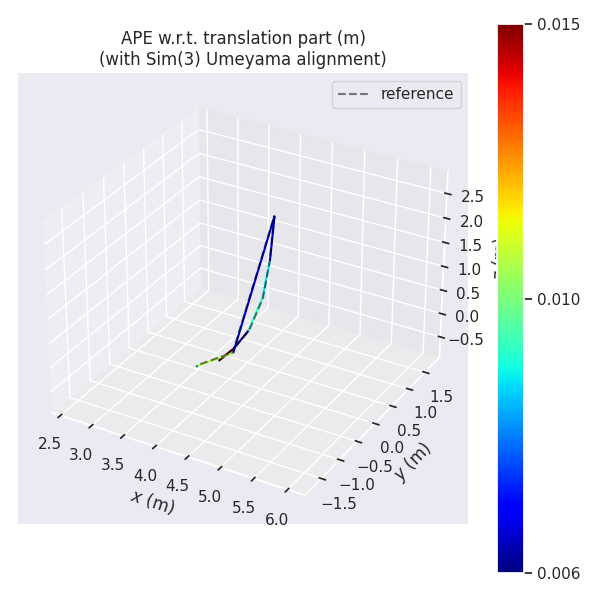
| ATE | 0.009275773624085258 | 0.008911073701572856 | 0.009171452222781755 | 0.0025754109983481123 | 0.006263528638853082 | 0.014666720114319158 | 0.000774359786927482 |
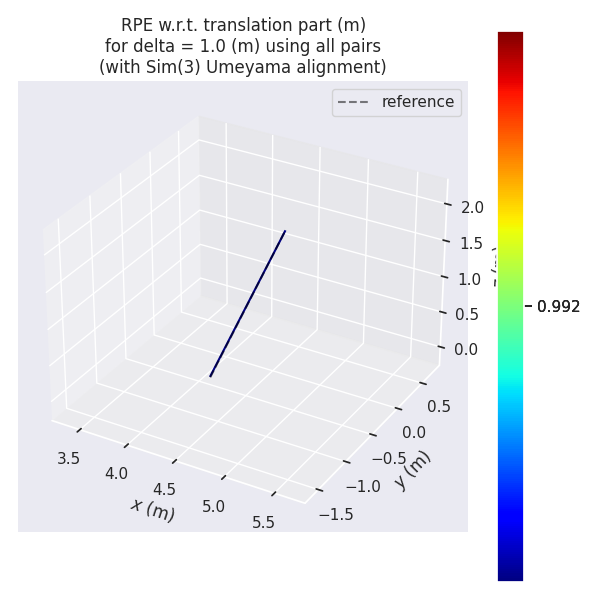
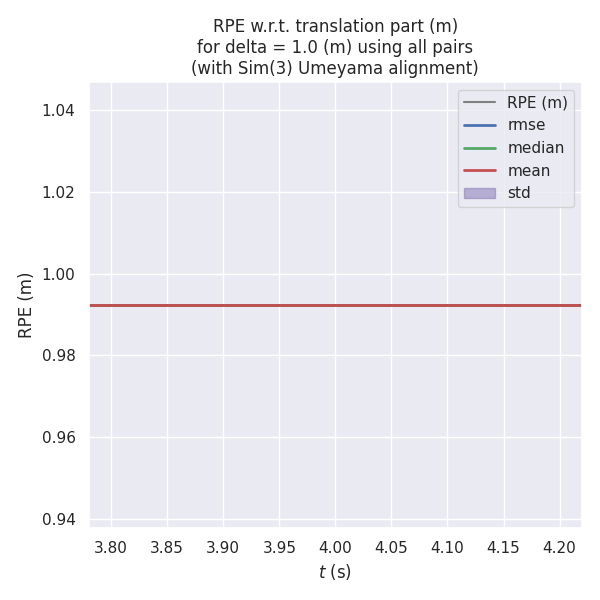
| RPE | 0.9922983495242351 | 0.9922983495242351 | 0.9922983495242351 | 0.0 | 0.9922983495242351 | 0.9922983495242351 | 0.9846560144685211 |
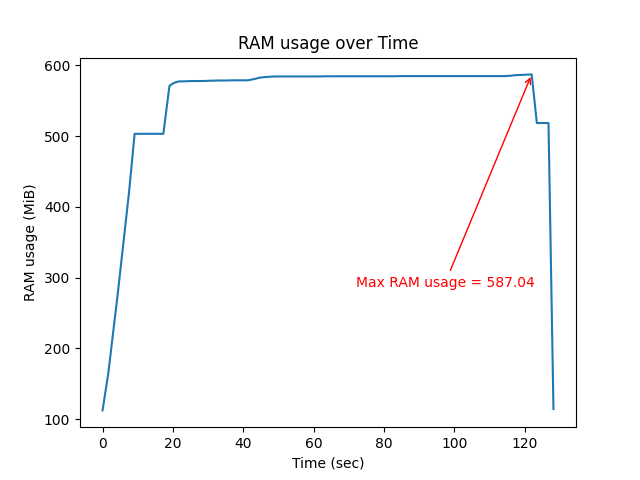
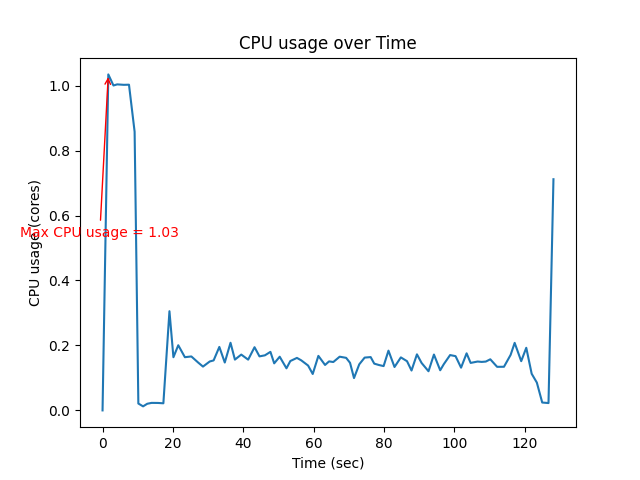
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.034596364266943 | 0.20663607713932622 | 587.04296875 |