Wiki Link
orb-slam2-ros-mono with MH_04_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-parameters | Camera_height | 192 |
| dataset-parameters | Camera_width | 300 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 146.886 |
| dataset-parameters | cy | 99.35 |
| dataset-parameters | fps | 2.0 |
| dataset-parameters | fx | 183.4616 |
| dataset-parameters | fy | 182.9184 |
| dataset-parameters | image_frequency | 2 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.4 |
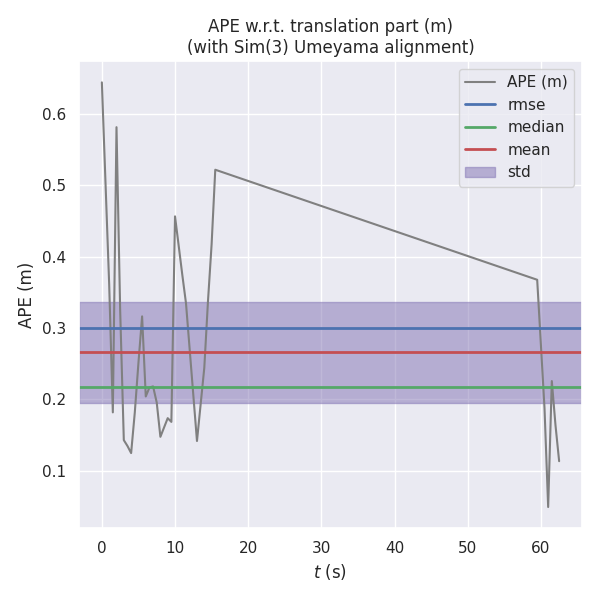
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
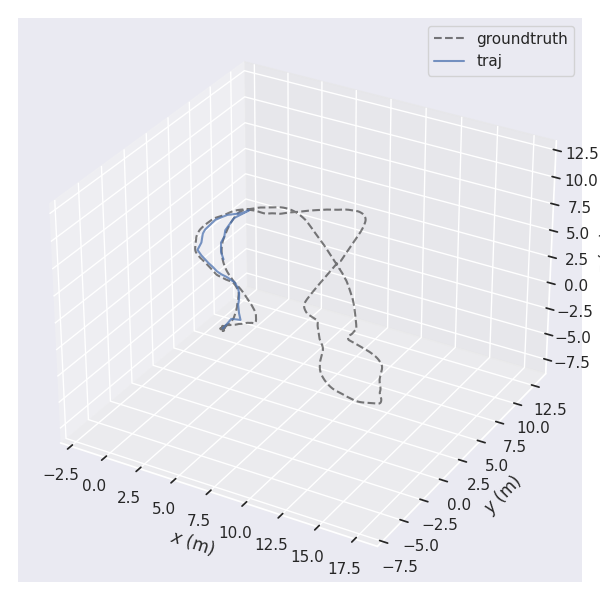
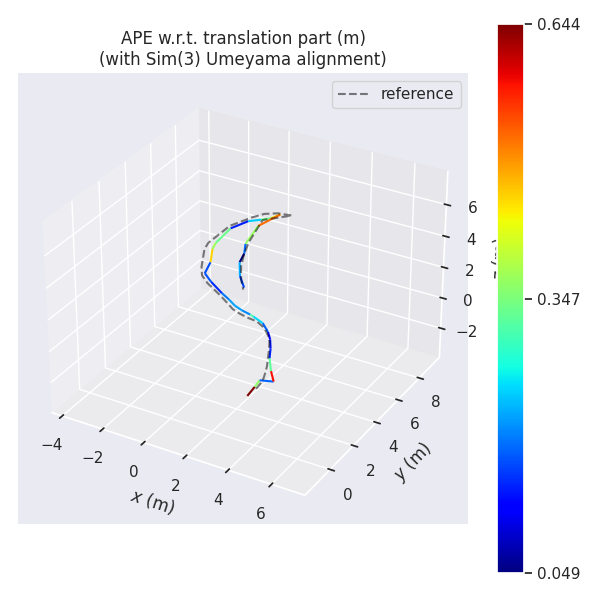
| ATE | 0.30050174732726254 | 0.26565997913000505 | 0.21729443529526904 | 0.14044954836304457 | 0.0489952628754766 | 0.644257683064198 | 2.8896416046956137 |
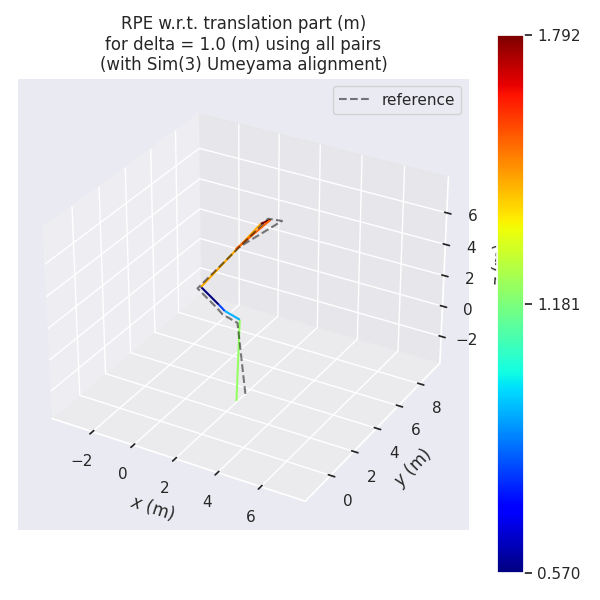
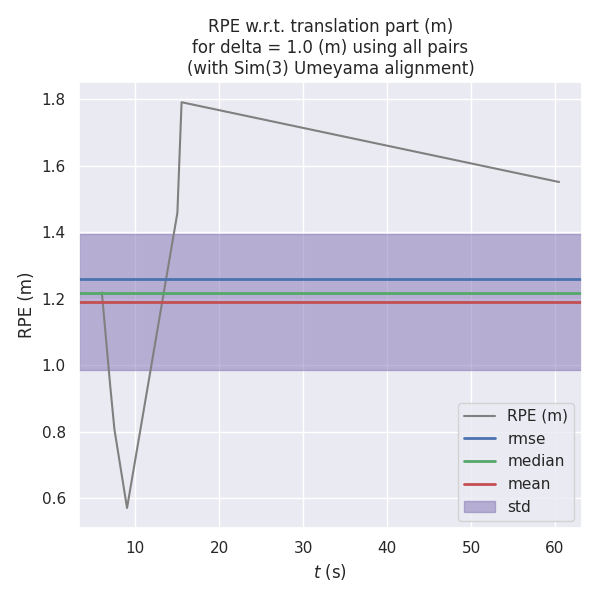
| RPE | 1.2580260125305585 | 1.1902742322110238 | 1.2183965090444533 | 0.407279634082033 | 0.5699651110912674 | 1.7915404758407811 | 11.078406137424755 |
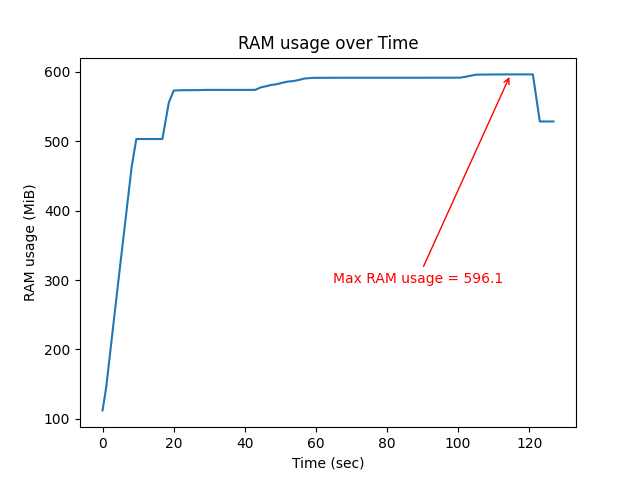
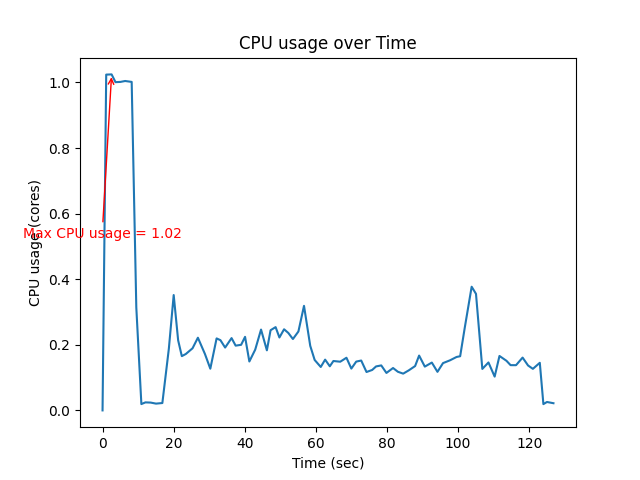
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0246250729715876 | 0.22045759783685476 | 596.09765625 |