Wiki Link
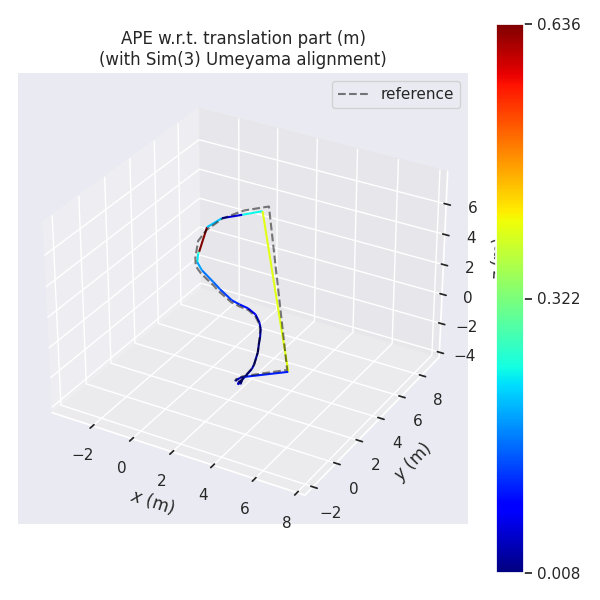
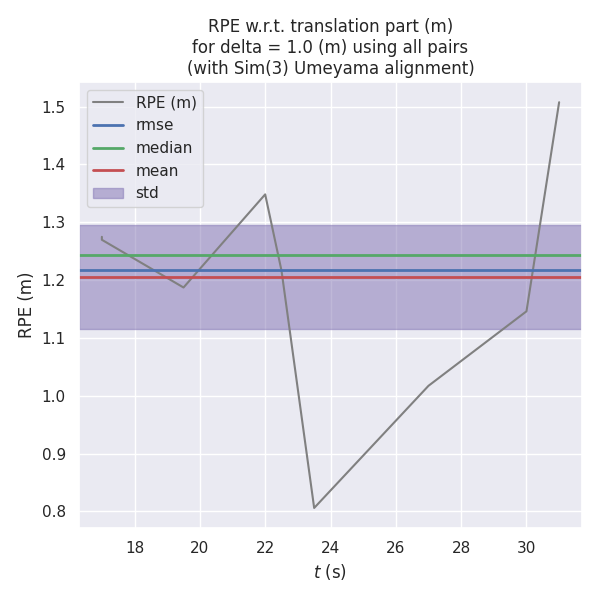
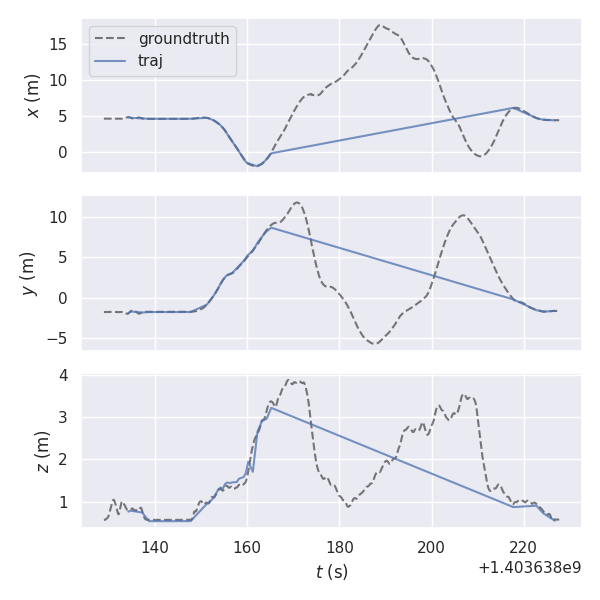
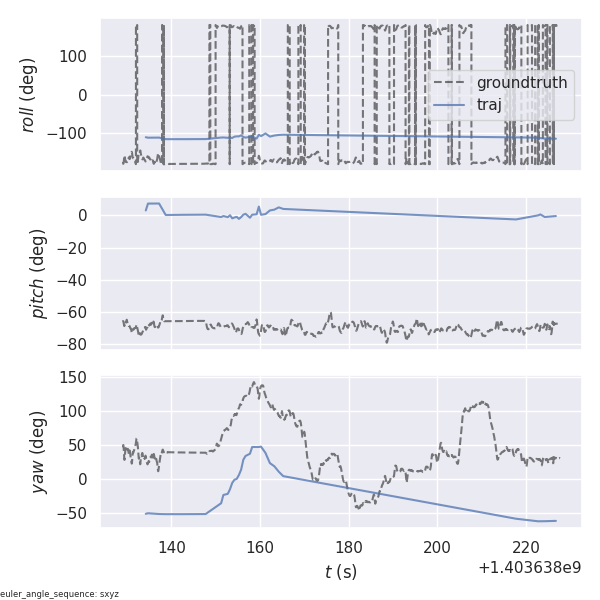
orb-slam2-ros-mono with MH_04_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-parameters | Camera_height | 384 |
| dataset-parameters | Camera_width | 601 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | fps | 2.0 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | image_frequency | 2 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.8 |
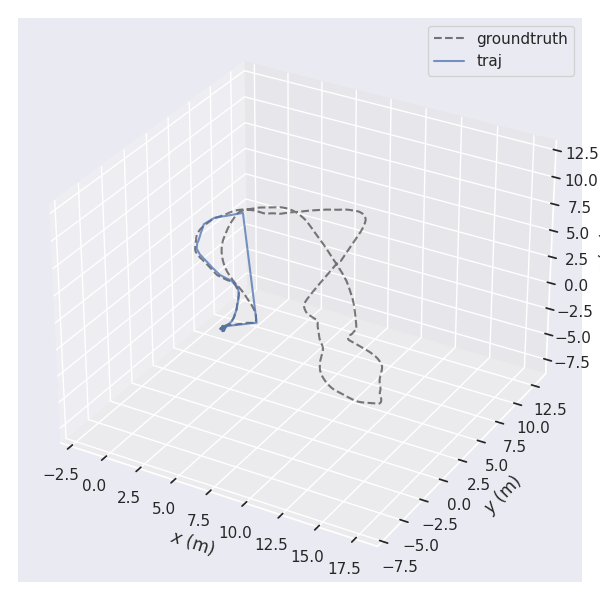
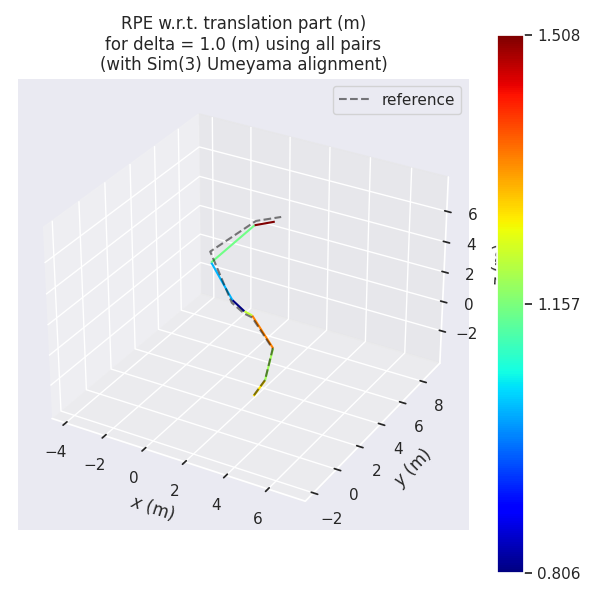
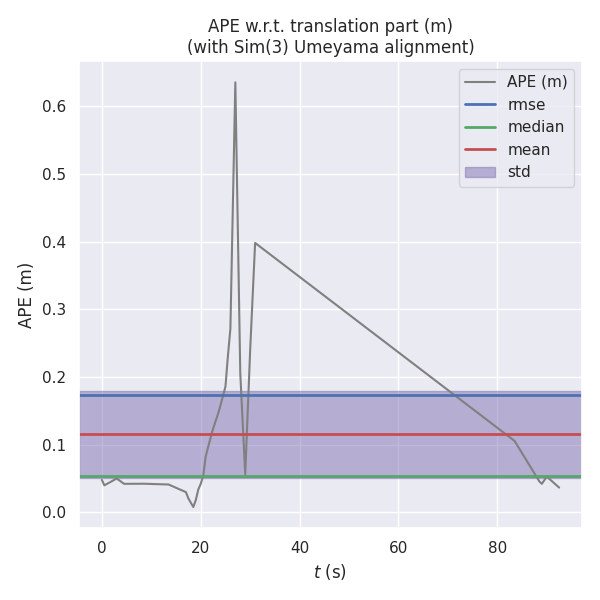
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
| ATE | 0.17278218260250827 | 0.11543498491163572 | 0.053374658064813674 | 0.12856300744513155 | 0.007906199269533539 | 0.6355108522193078 | 0.9553178439963683 |
| RPE | 1.2180184718831577 | 1.2046267090116232 | 1.243020702874205 | 0.18012076444543776 | 0.8058203794722651 | 1.5076695701918068 | 14.835689978485824 |
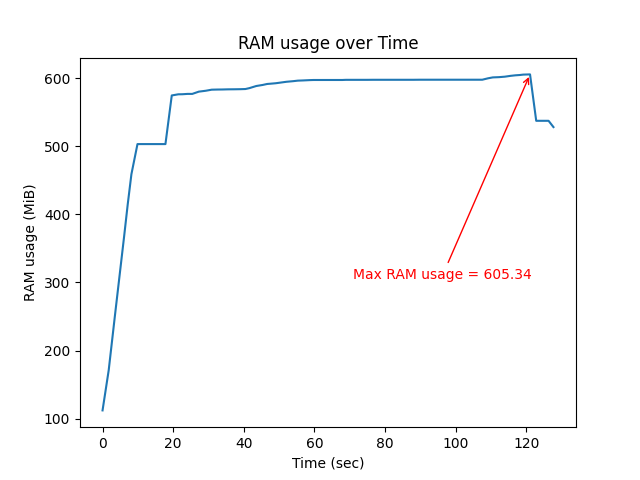
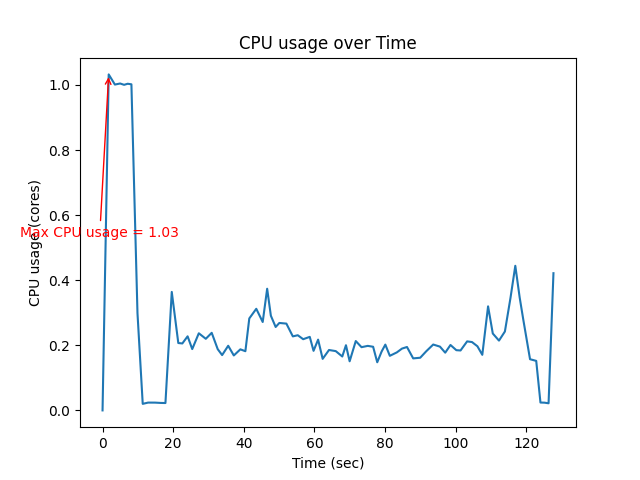
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0324231879632617 | 0.2569582559162411 | 605.3359375 |