Wiki Link

orb-slam2-ros-mono with MH_04_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-parameters | Camera_height | 480 |
| dataset-parameters | Camera_width | 752 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 367.215 |
| dataset-parameters | cy | 248.375 |
| dataset-parameters | fps | 2.0 |
| dataset-parameters | fx | 458.654 |
| dataset-parameters | fy | 457.296 |
| dataset-parameters | image_frequency | 2 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 1.0 |
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
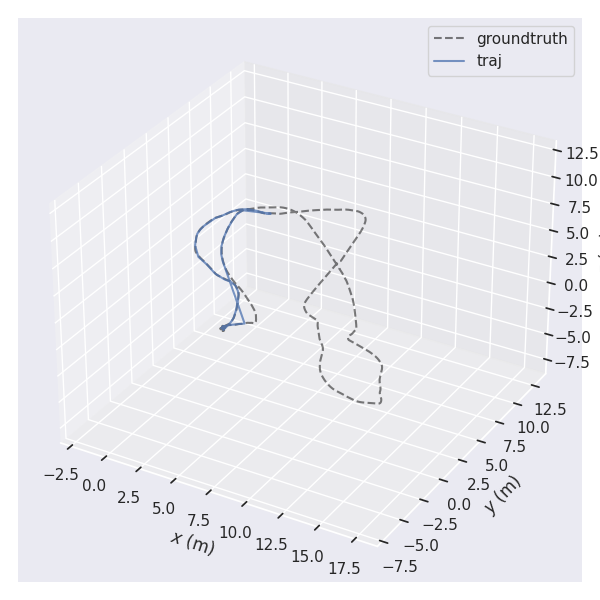
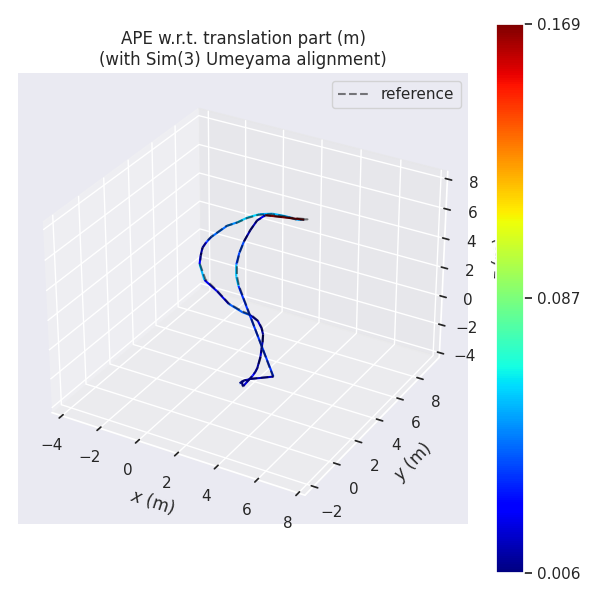
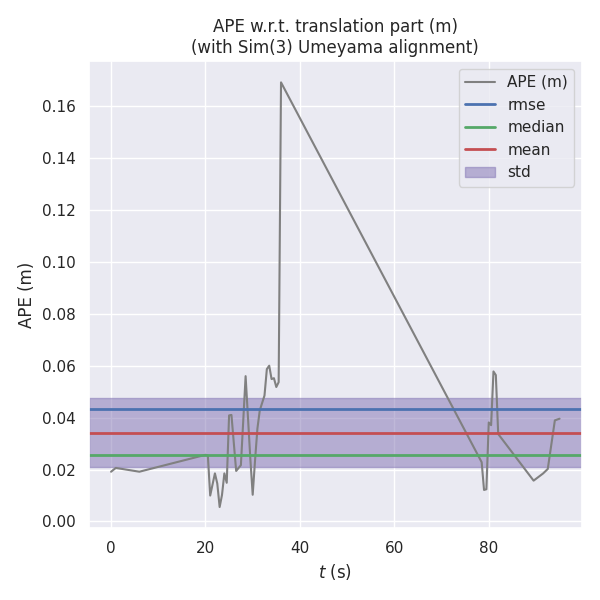
| ATE | 0.04327306289770433 | 0.034263533681895414 | 0.025429333373197346 | 0.026430441392044392 | 0.005572610824826302 | 0.16911830010033613 | 0.08051999281959303 |
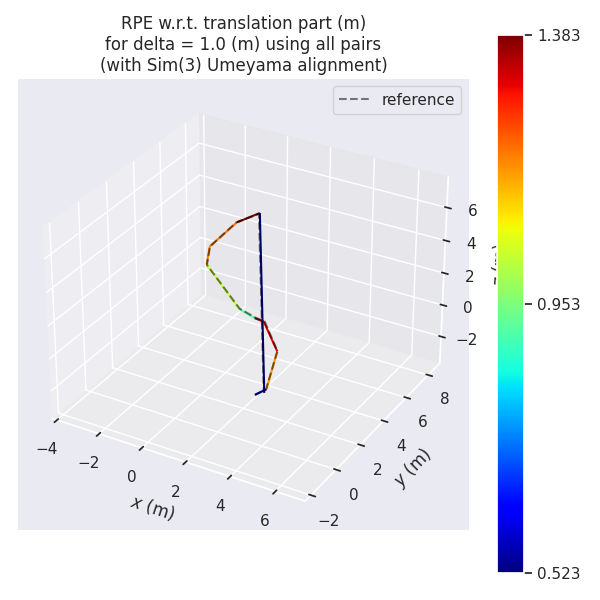
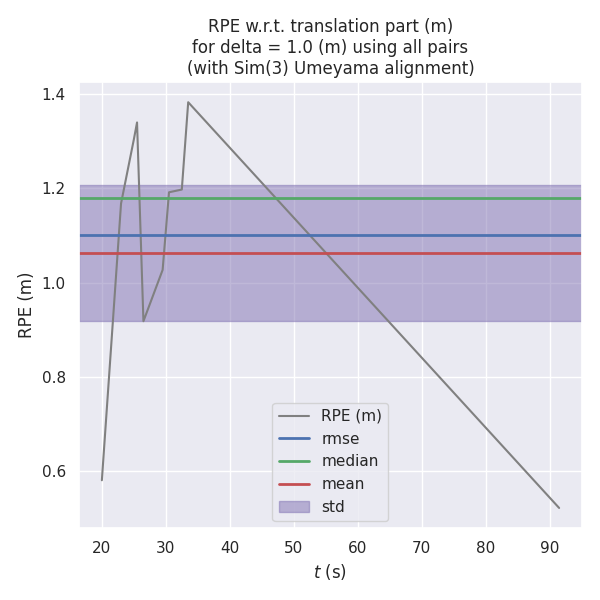
| RPE | 1.1016235153616531 | 1.0633354364436083 | 1.1799730855484483 | 0.2879099150794354 | 0.5225560960361834 | 1.3827253283914693 | 12.135743695977665 |
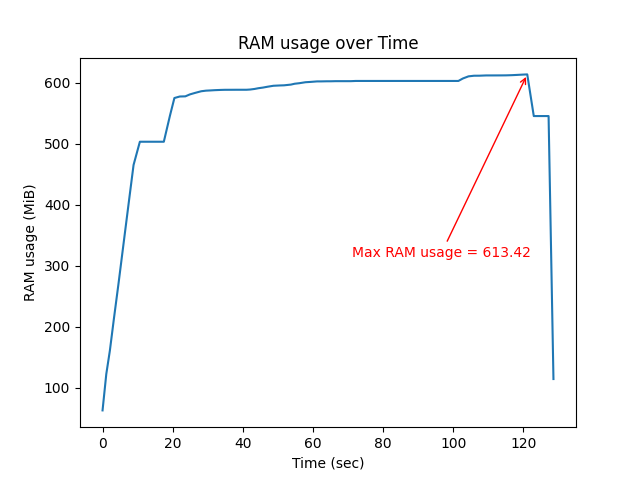
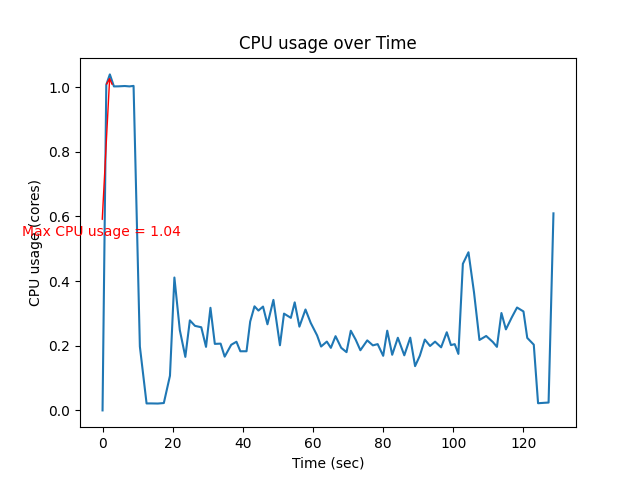
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0394820367689734 | 0.28494811097782946 | 613.421875 |