Wiki Link
orb-slam2-ros-mono with MH_04_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 2 |
| dataset-parameters | Camera_height | 192 |
| dataset-parameters | Camera_width | 300 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 146.886 |
| dataset-parameters | cy | 99.35 |
| dataset-parameters | fps | 10.0 |
| dataset-parameters | fx | 183.4616 |
| dataset-parameters | fy | 182.9184 |
| dataset-parameters | image_frequency | 10 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.4 |
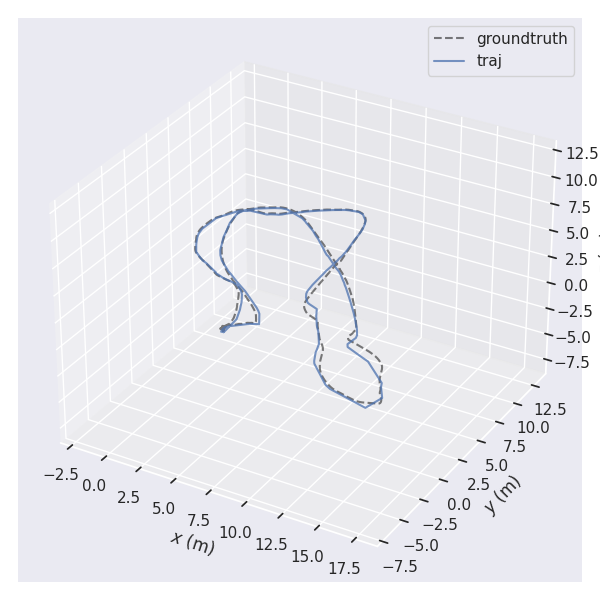
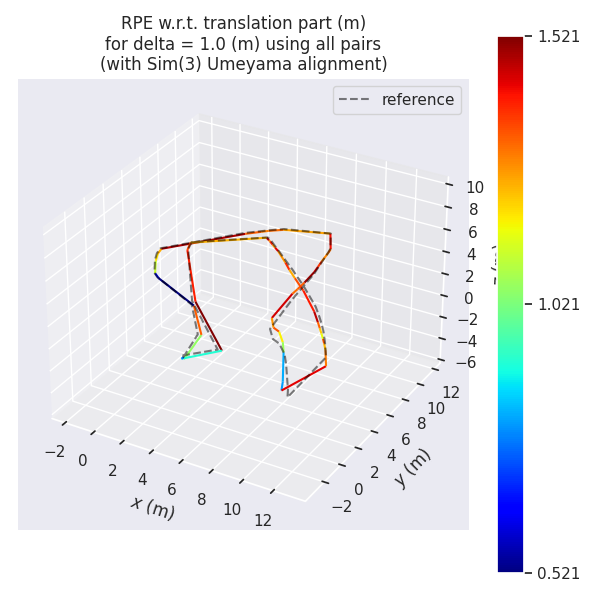
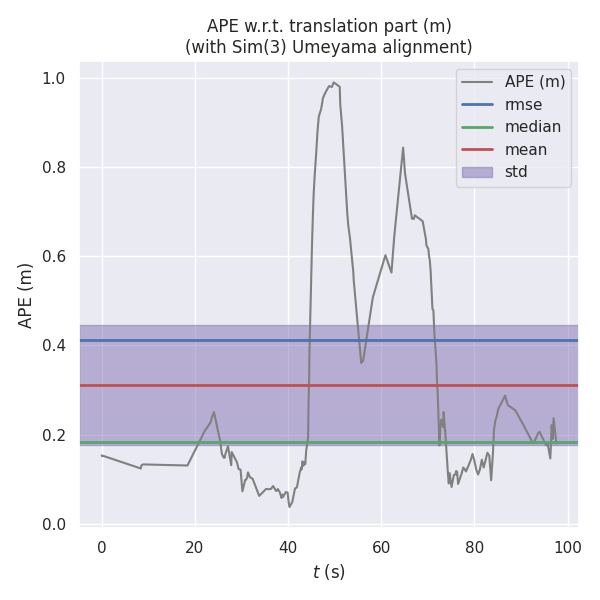
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
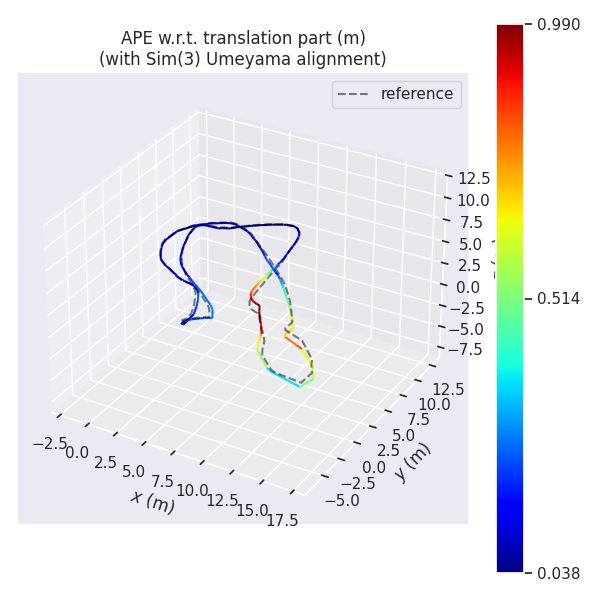
| ATE | 0.4126704282940559 | 0.3115659772219025 | 0.18367910283235406 | 0.2705984556980333 | 0.03780787457067652 | 0.9899702199452032 | 30.653438829911916 |
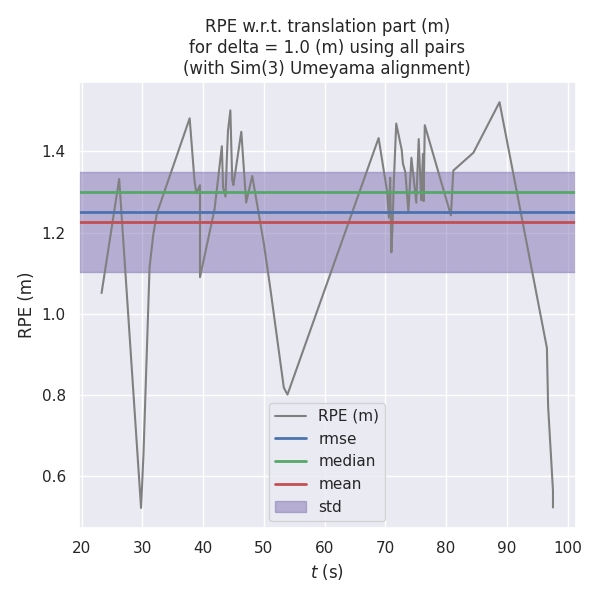
| RPE | 1.2505277747678236 | 1.225715765404326 | 1.300700092797208 | 0.24787209989236708 | 0.5207104688547046 | 1.5214751322288331 | 86.01008435061706 |
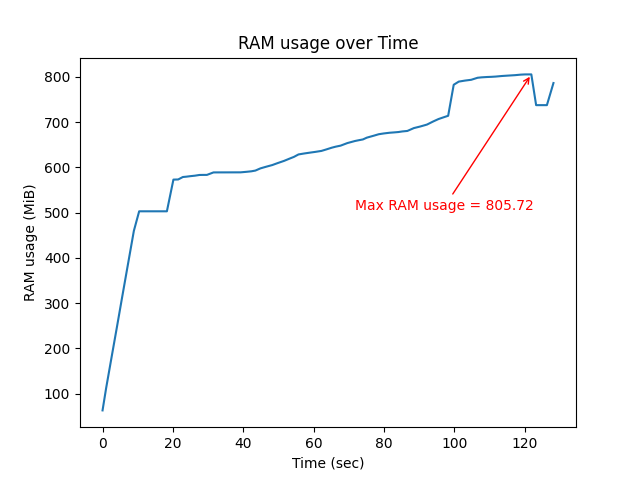
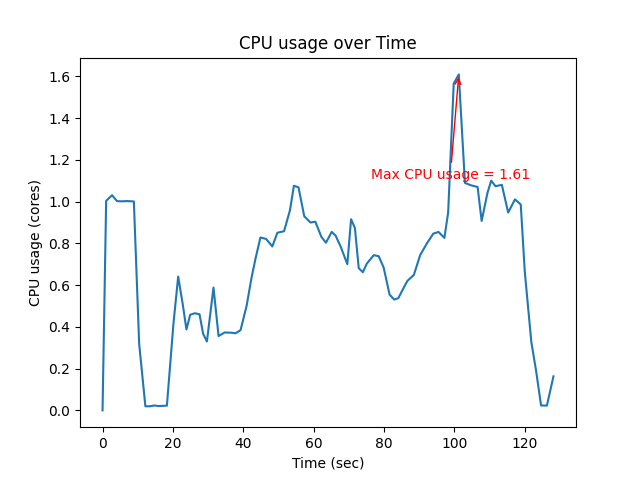
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.6095045496806841 | 0.6824640181026472 | 805.72265625 |