Wiki Link
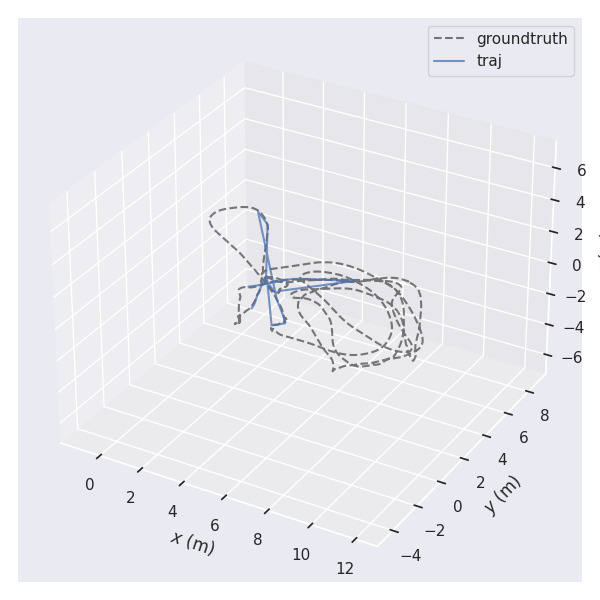
orb-slam2-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-parameters | Camera_height | 240 |
| dataset-parameters | Camera_width | 376 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 183.6075 |
| dataset-parameters | cy | 124.1875 |
| dataset-parameters | fps | 2.0 |
| dataset-parameters | fx | 229.327 |
| dataset-parameters | fy | 228.648 |
| dataset-parameters | image_frequency | 2 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.5 |
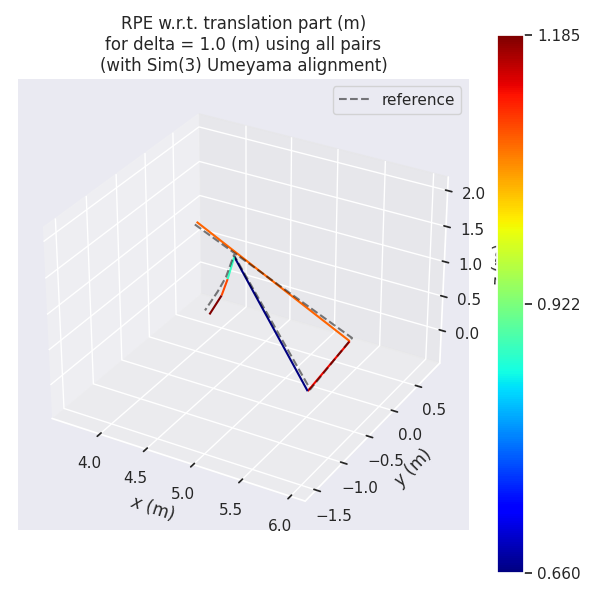
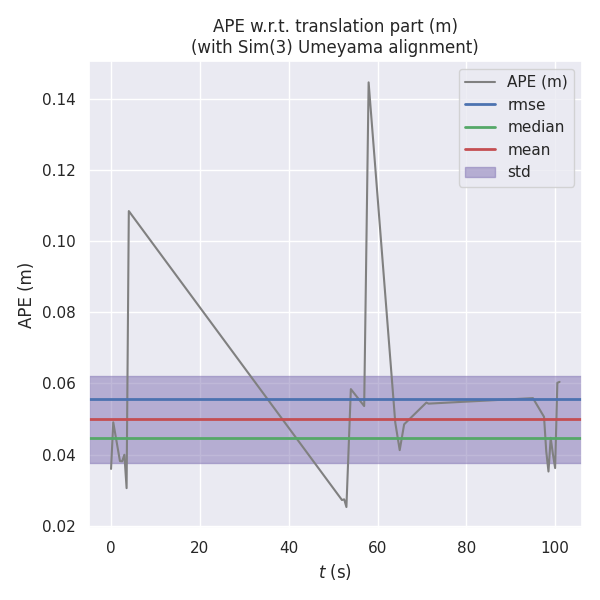
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
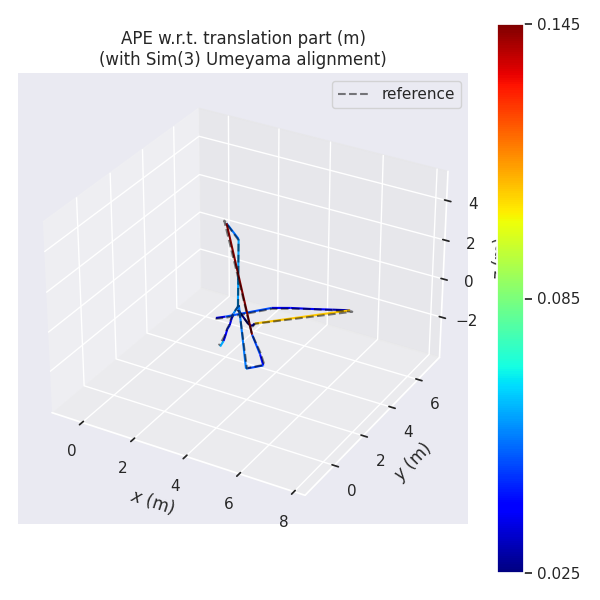
| ATE | 0.05558644226748673 | 0.049948041296751684 | 0.044692351109938605 | 0.024393559284668215 | 0.025229057088258372 | 0.1447077232669606 | 0.08342601922682914 |
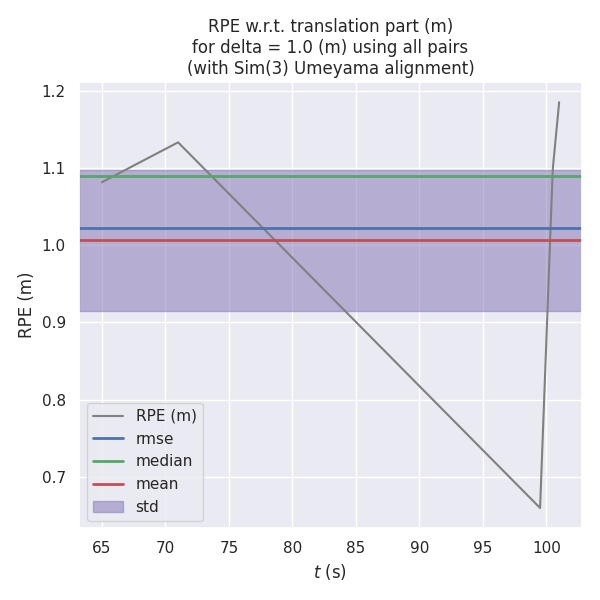
| RPE | 1.022511103372371 | 1.0061842716547336 | 1.0900727957961602 | 0.18199496694803752 | 0.6595073401922195 | 1.1851733986567947 | 6.273173739118702 |
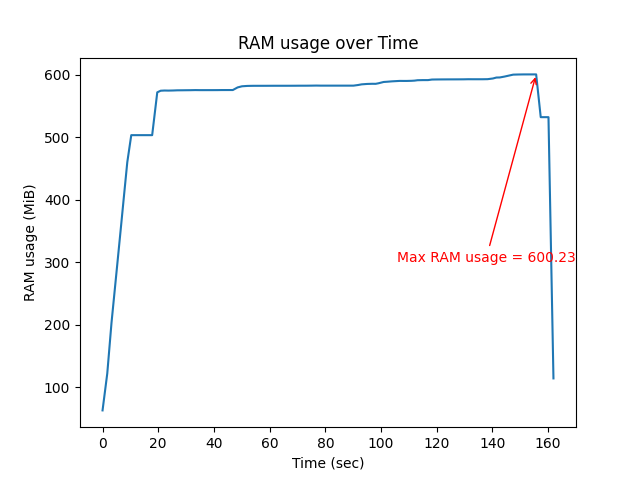
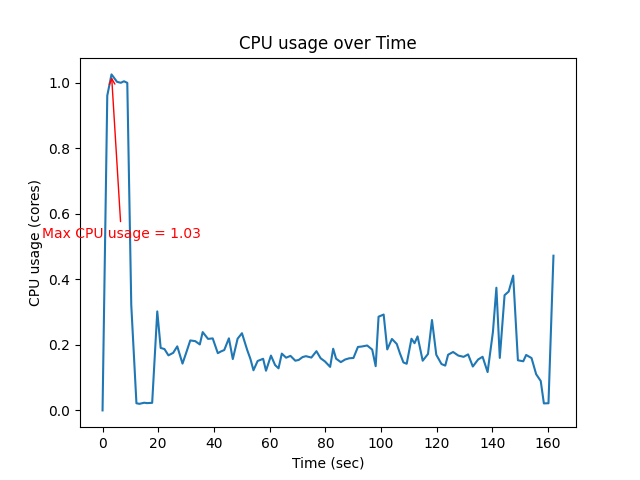
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0259124755053453 | 0.22225252765415 | 600.2265625 |