Wiki Link

orb-slam2-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-parameters | Camera_height | 288 |
| dataset-parameters | Camera_width | 451 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | fps | 2.0 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | image_frequency | 2 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.6 |
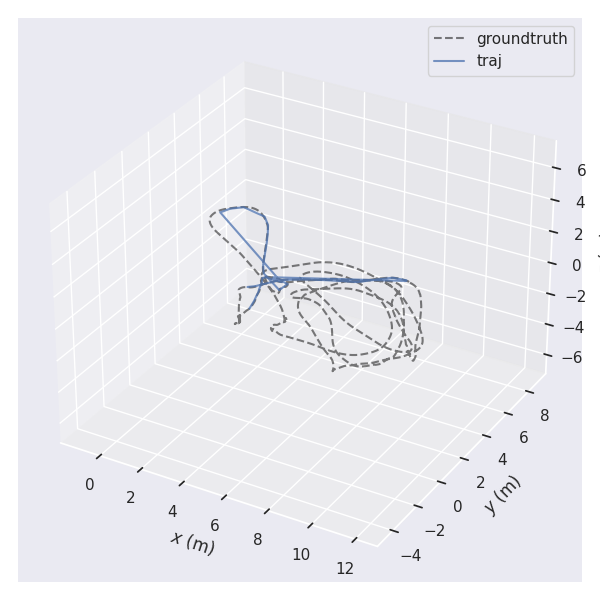
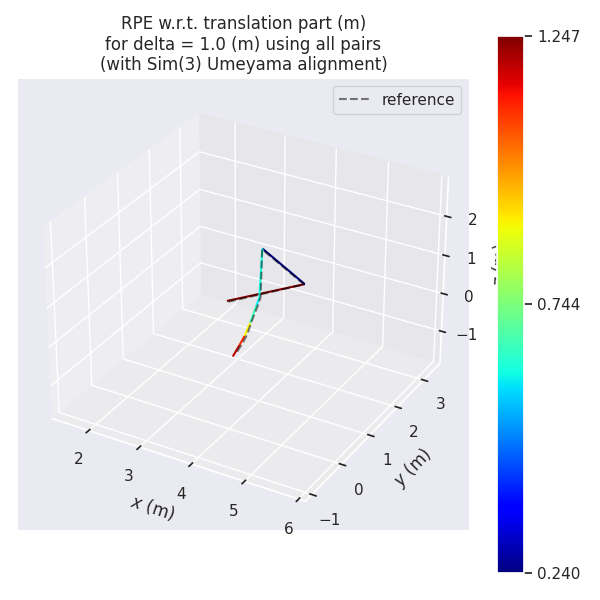
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
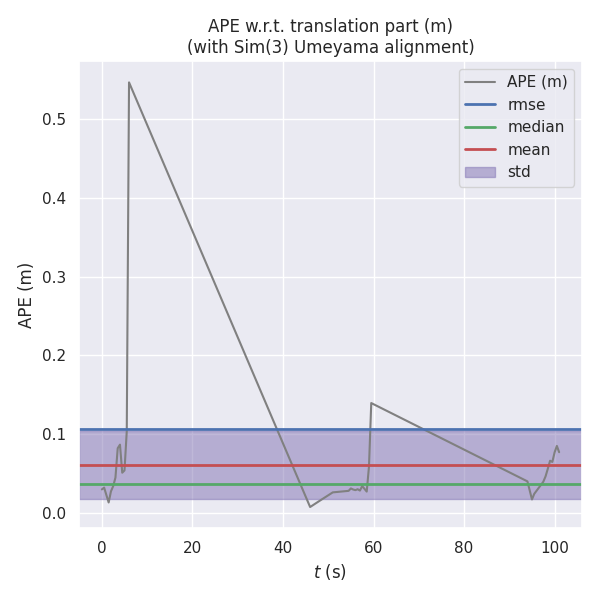
| ATE | 0.10582369825660136 | 0.06050430706225754 | 0.03666309536009095 | 0.08682098789820505 | 0.007306448352045348 | 0.5468814580102489 | 0.4031515840573517 |
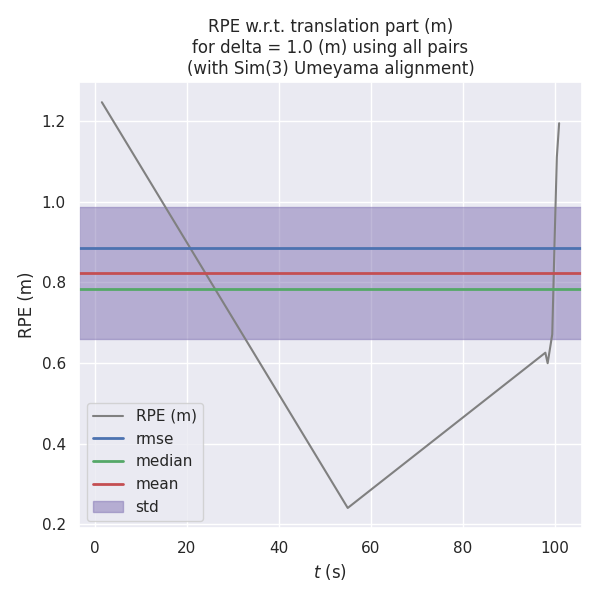
| RPE | 0.8861919805315076 | 0.8233932130623363 | 0.7845109566594504 | 0.32765811914438814 | 0.24008608652363753 | 1.2472523651692362 | 6.282689810866847 |
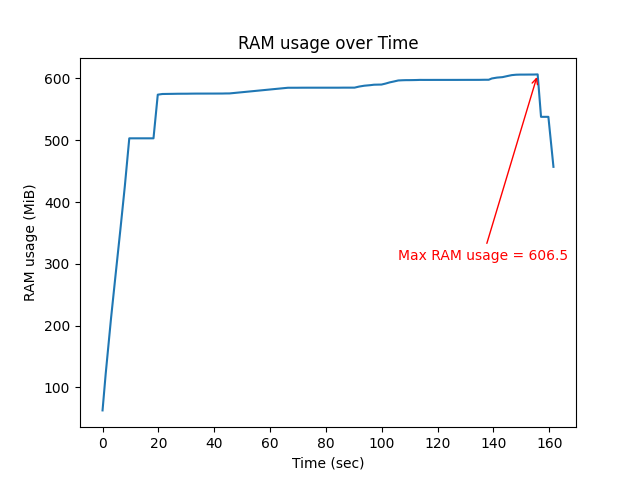
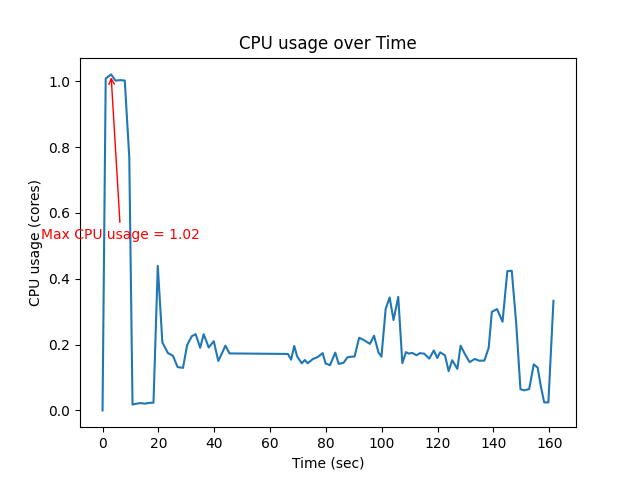
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0208959129072204 | 0.22274069370997357 | 606.5 |