Wiki Link
orb-slam2-ros-mono with MH_03_medium
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-parameters | Camera_height | 480 |
| dataset-parameters | Camera_width | 752 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 367.215 |
| dataset-parameters | cy | 248.375 |
| dataset-parameters | fps | 20.0 |
| dataset-parameters | fx | 458.654 |
| dataset-parameters | fy | 457.296 |
| dataset-parameters | image_frequency | 20 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 1.0 |
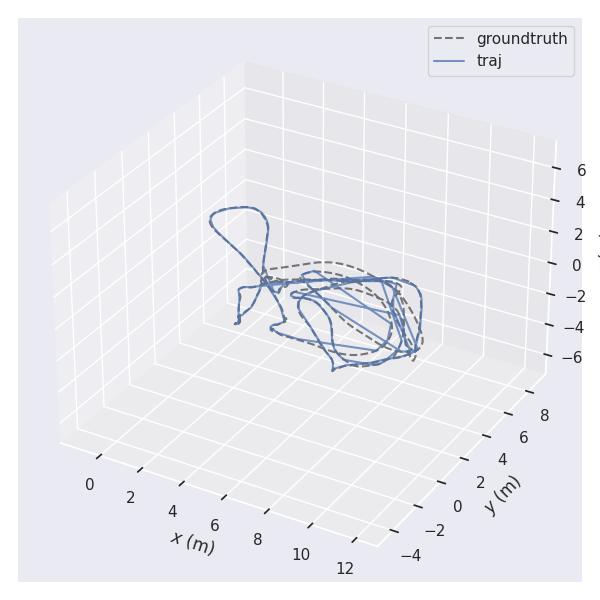
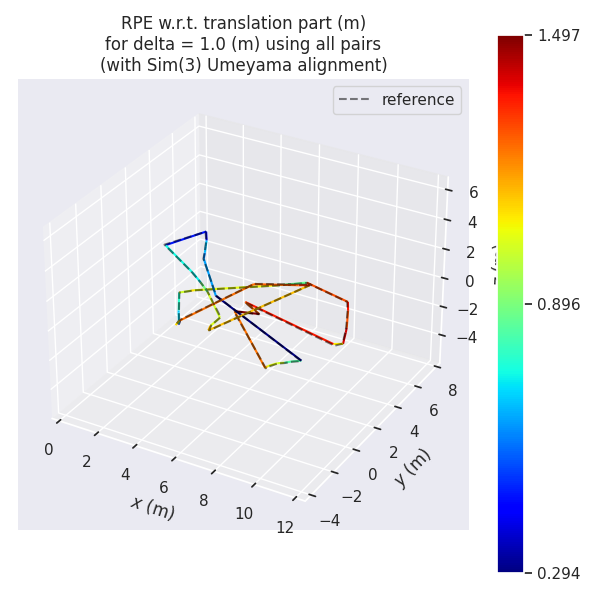
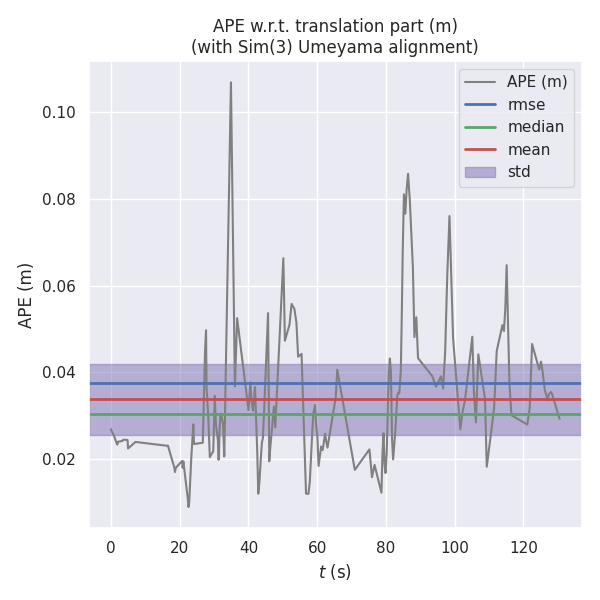
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
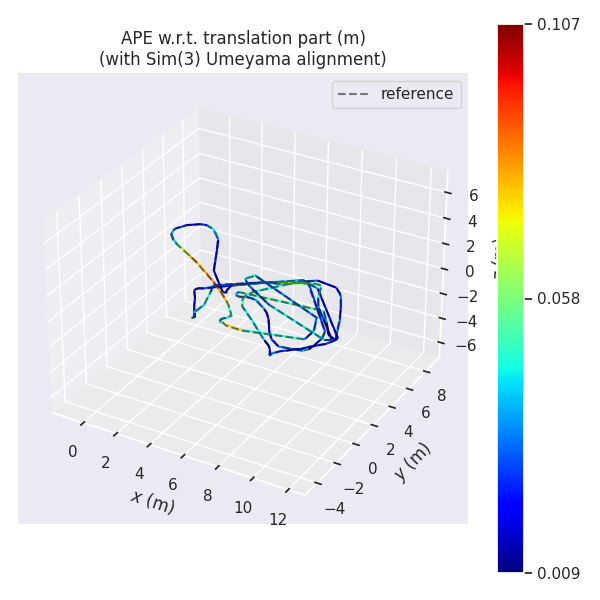
| ATE | 0.03750134617080483 | 0.03372119038123145 | 0.030226891562257184 | 0.016408299238351364 | 0.008821414327198445 | 0.10693343183290914 | 0.22642250530422864 |
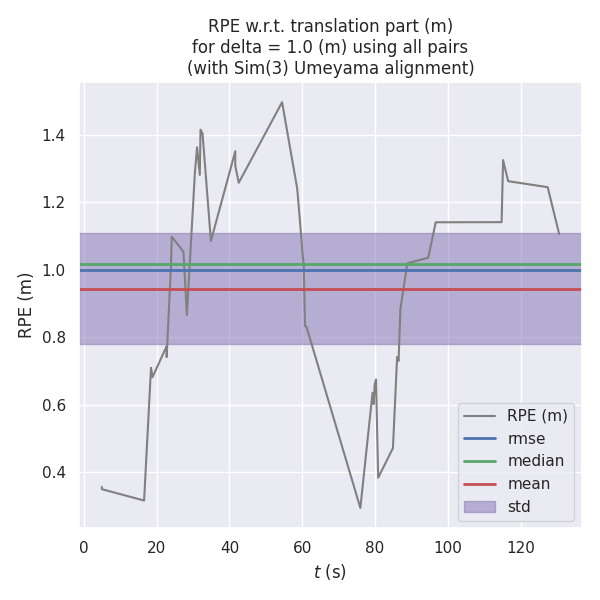
| RPE | 1.000414061489251 | 0.9447752280595213 | 1.0183959917733998 | 0.32898033812144234 | 0.2937442163281198 | 1.4974449139155348 | 46.03810154356926 |
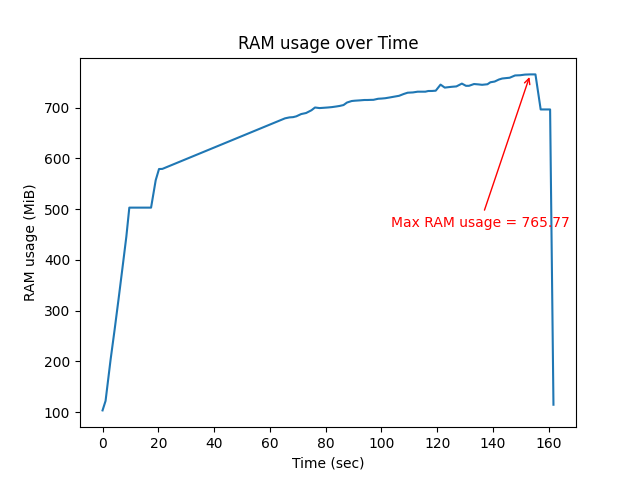
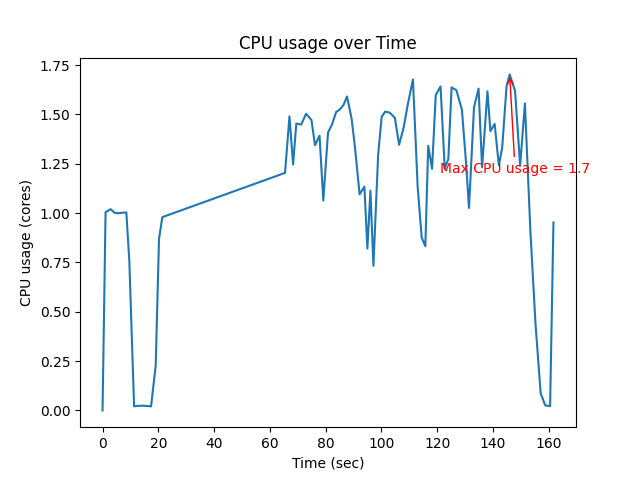
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.7030990814930624 | 1.1421843700772887 | 765.765625 |