Wiki Link
orb-slam2-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-parameters | Camera_height | 192 |
| dataset-parameters | Camera_width | 300 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 146.886 |
| dataset-parameters | cy | 99.35 |
| dataset-parameters | fps | 1.0 |
| dataset-parameters | fx | 183.4616 |
| dataset-parameters | fy | 182.9184 |
| dataset-parameters | image_frequency | 1 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.4 |
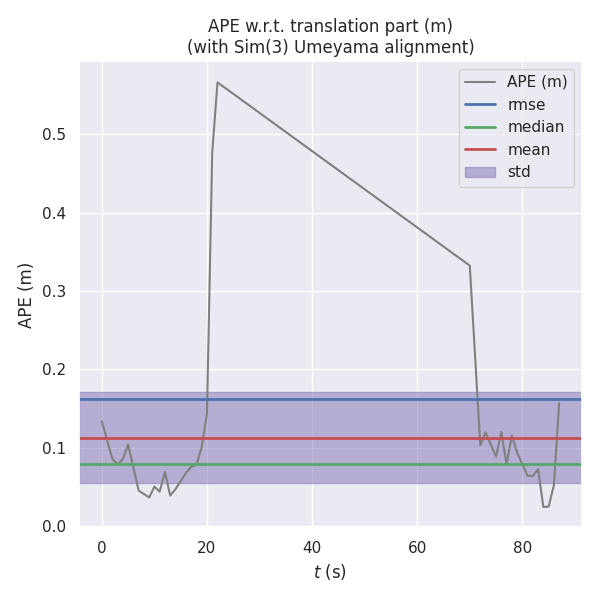
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
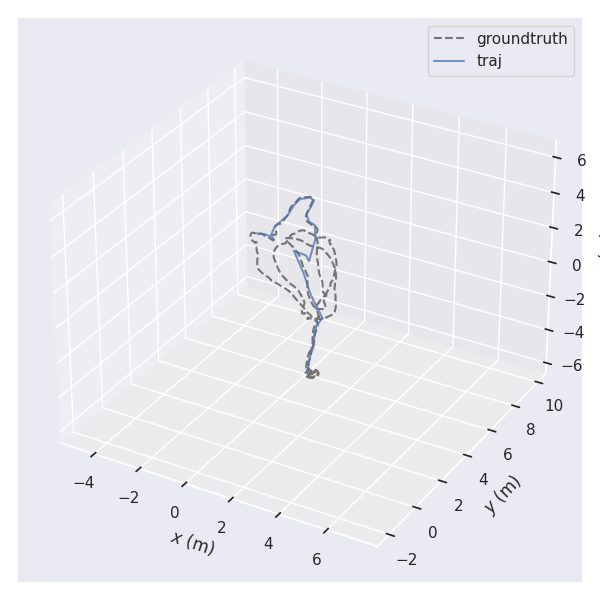
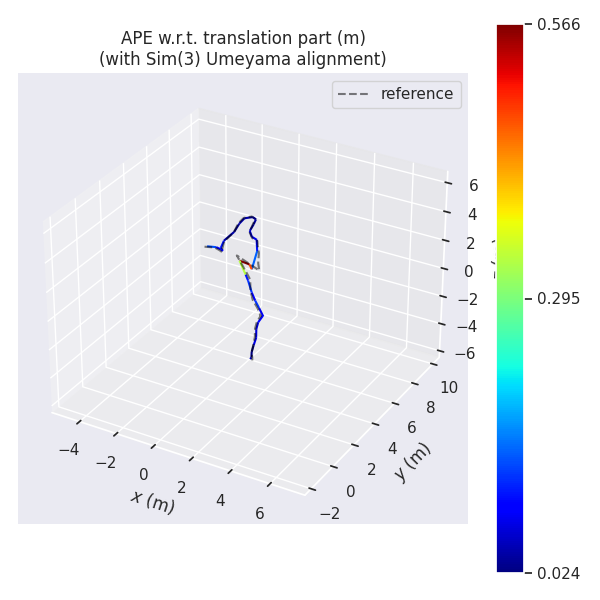
| ATE | 0.161631183955511 | 0.11276884477619065 | 0.07878496130351974 | 0.11579217276959461 | 0.024173936253820378 | 0.566281551339261 | 0.8882377473132479 |
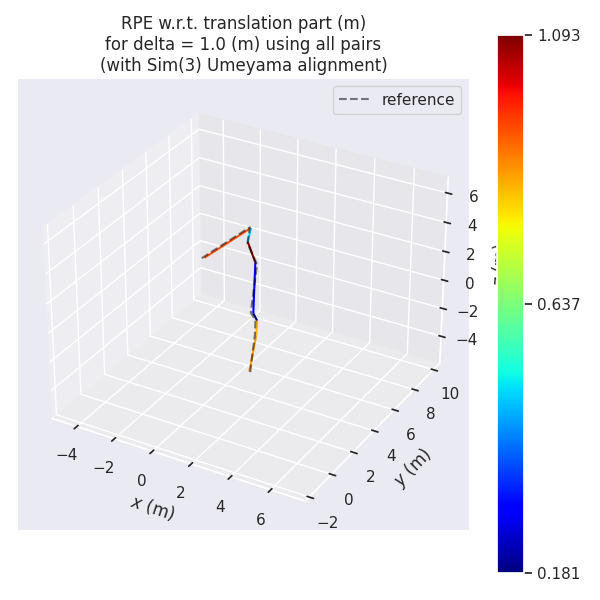
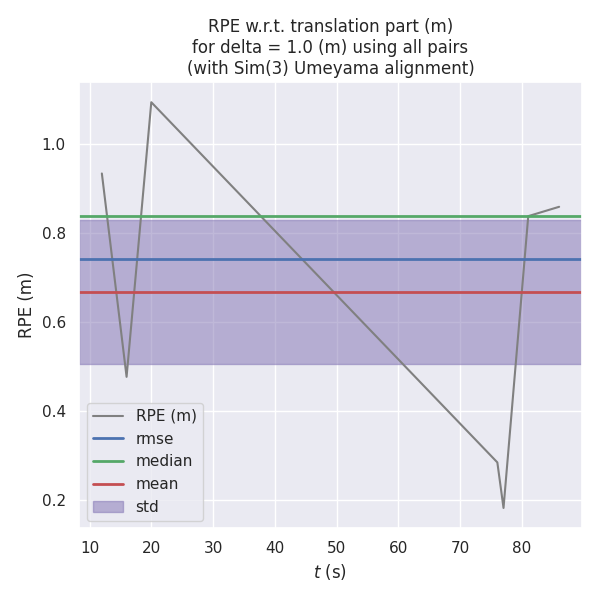
| RPE | 0.7407253625643245 | 0.6658374678177267 | 0.8369169575916949 | 0.3245528141861165 | 0.18102768894384394 | 1.0929858170302982 | 3.8407184392223503 |
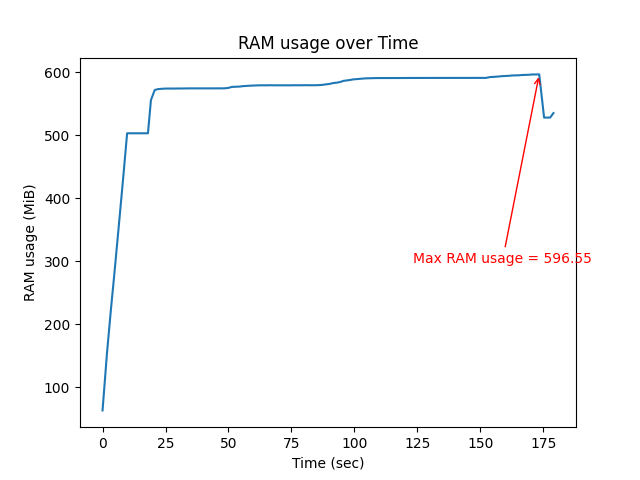
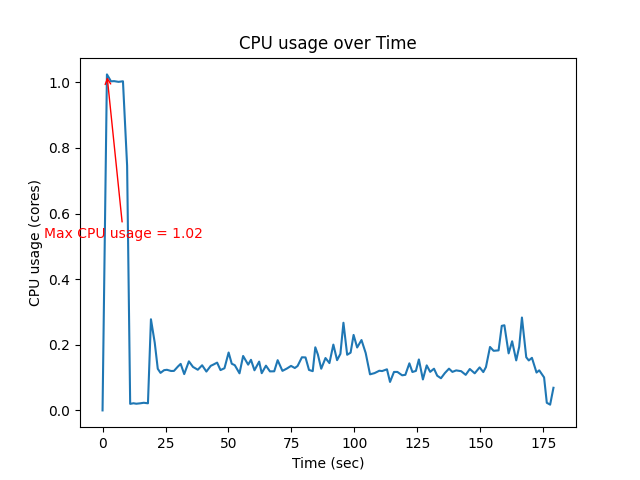
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0238985674304584 | 0.1755521113967753 | 596.546875 |