Wiki Link
orb-slam2-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-parameters | Camera_height | 192 |
| dataset-parameters | Camera_width | 300 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 146.886 |
| dataset-parameters | cy | 99.35 |
| dataset-parameters | fps | 5.0 |
| dataset-parameters | fx | 183.4616 |
| dataset-parameters | fy | 182.9184 |
| dataset-parameters | image_frequency | 5 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.4 |
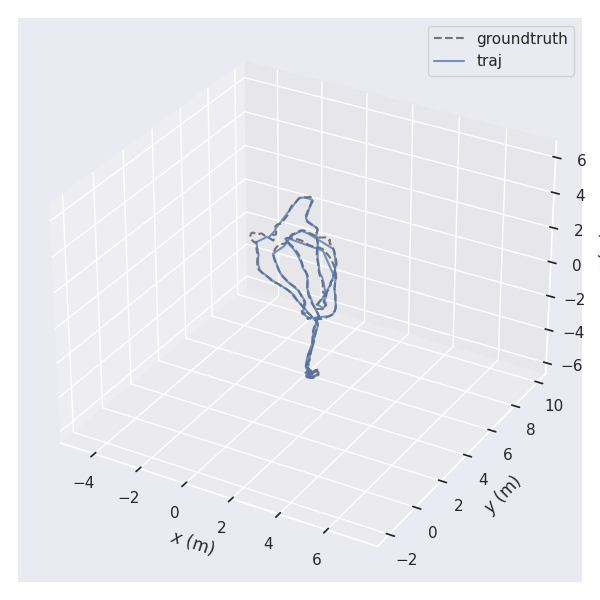
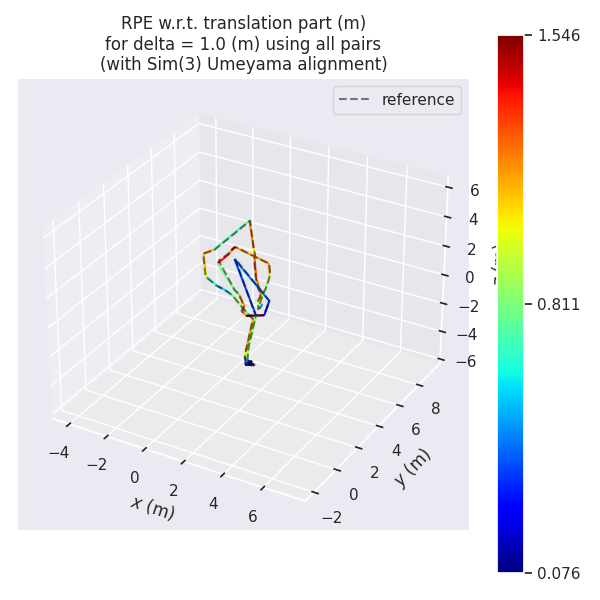
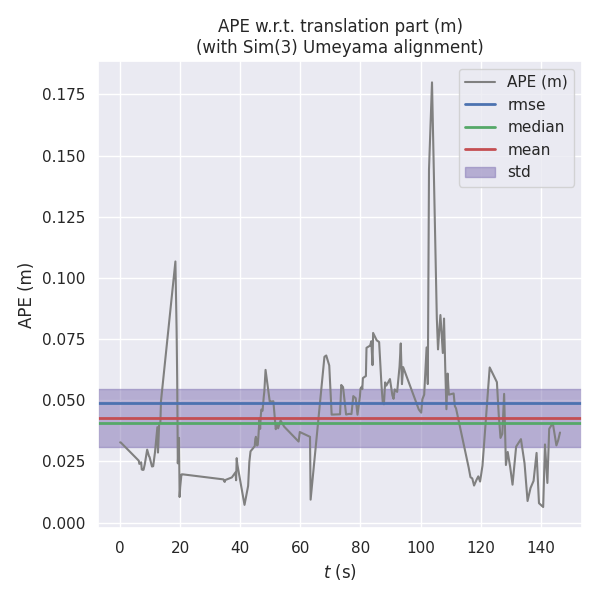
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
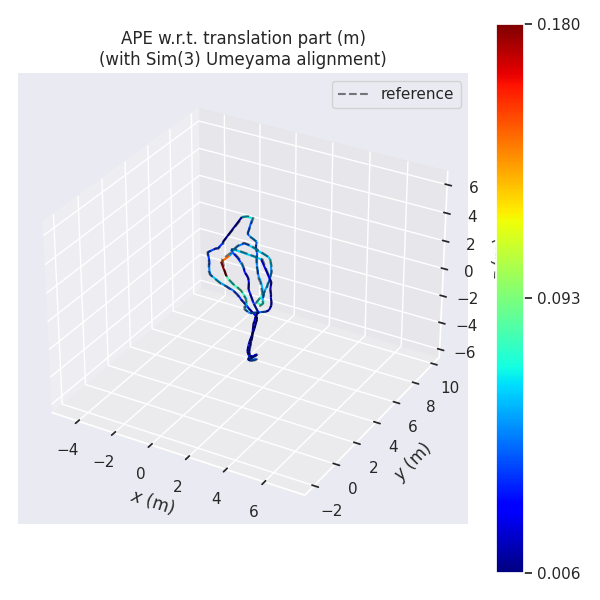
| ATE | 0.04881817784670416 | 0.04268061886361291 | 0.04066817171985167 | 0.023697663633604208 | 0.00639014658964231 | 0.17995343125762853 | 0.40038003402976946 |
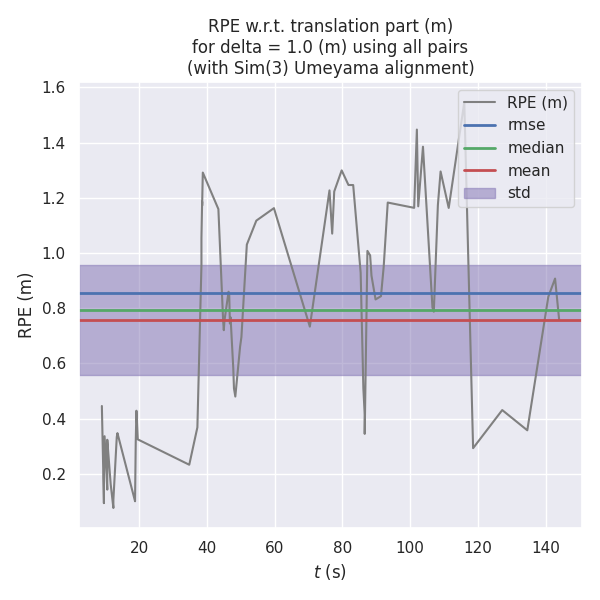
| RPE | 0.8559726619406453 | 0.7564032623383465 | 0.794894837071366 | 0.4006785528496138 | 0.07600701563111824 | 1.5463796060177502 | 57.149757443200826 |
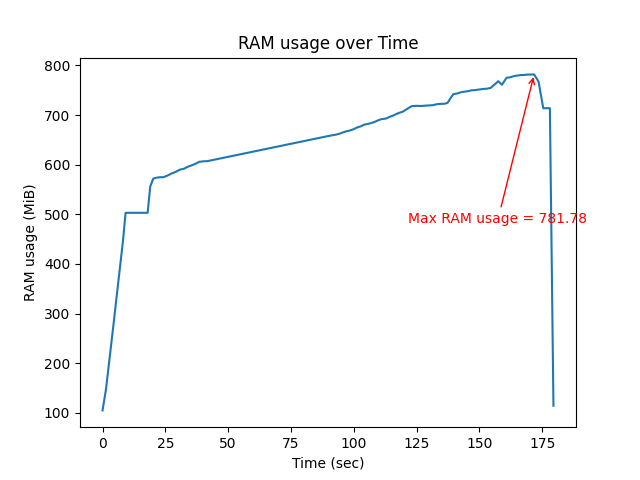
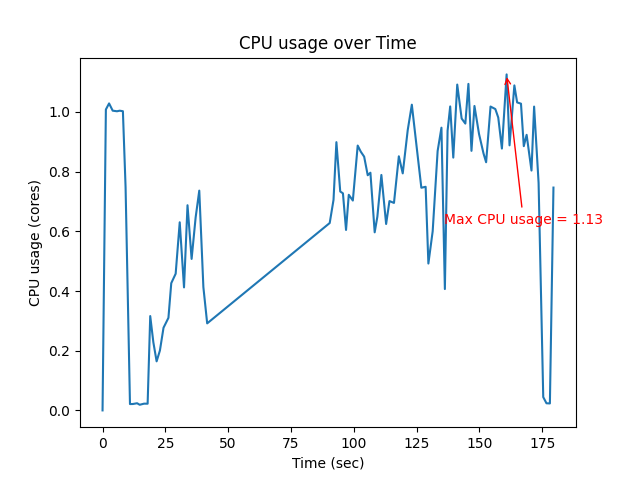
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.125884624008274 | 0.6881357676913273 | 781.78125 |