Wiki Link
orb-slam2-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 4 |
| dataset-parameters | Camera_height | 480 |
| dataset-parameters | Camera_width | 752 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 367.215 |
| dataset-parameters | cy | 248.375 |
| dataset-parameters | fps | 5.0 |
| dataset-parameters | fx | 458.654 |
| dataset-parameters | fy | 457.296 |
| dataset-parameters | image_frequency | 5 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 1.0 |
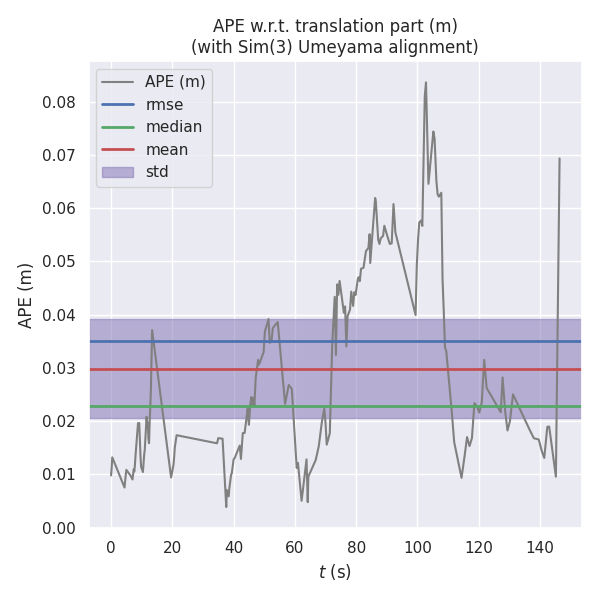
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
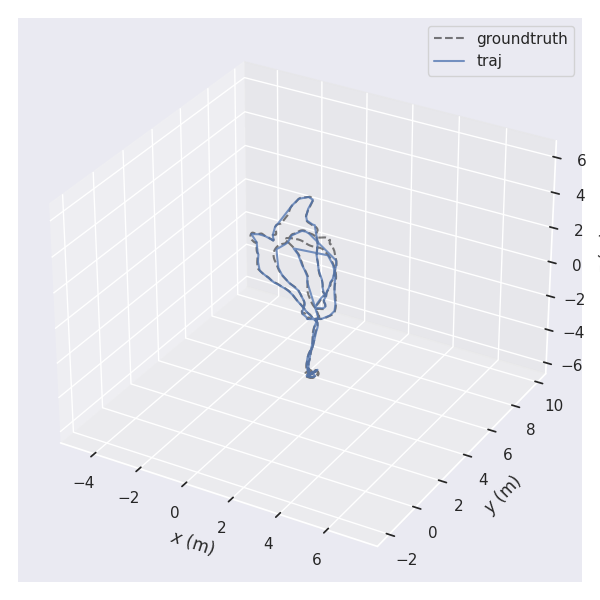
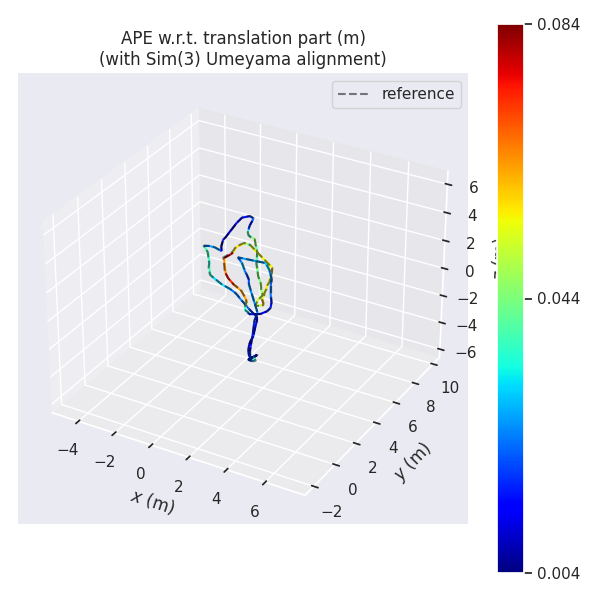
| ATE | 0.035127731583666714 | 0.029879933523743494 | 0.02289784395098833 | 0.018470167807326653 | 0.003850543111493645 | 0.08366067990237834 | 0.21100673698261727 |
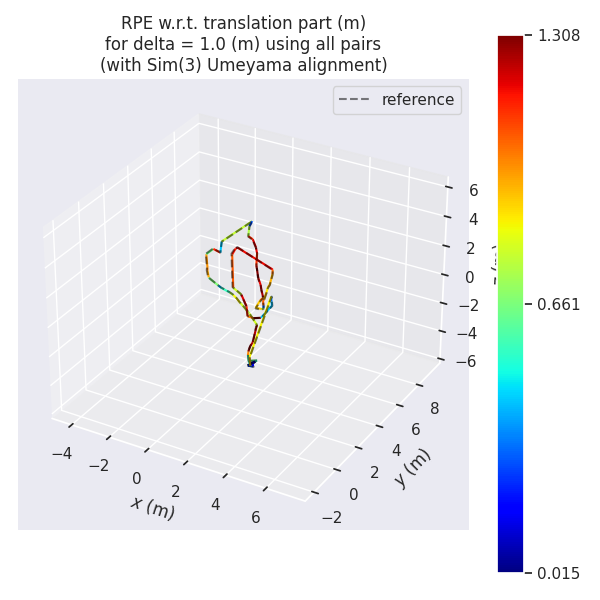
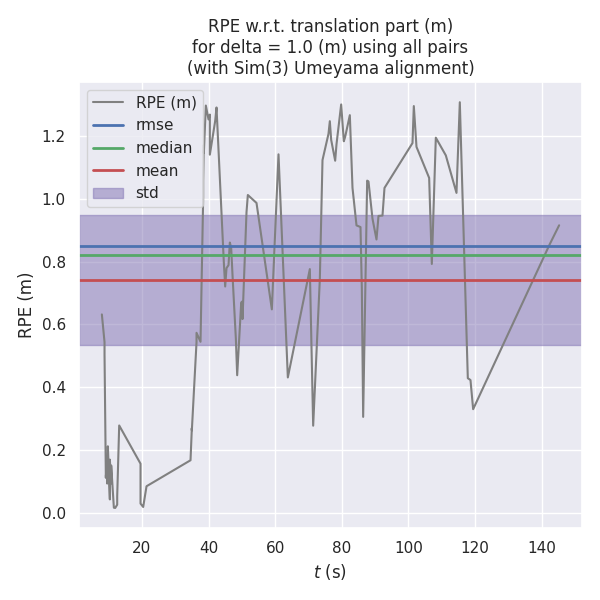
| RPE | 0.8486413754101808 | 0.7408916914625023 | 0.8201335769152541 | 0.41384983457761065 | 0.015150517676850194 | 1.3075219190760017 | 69.138449669576 |
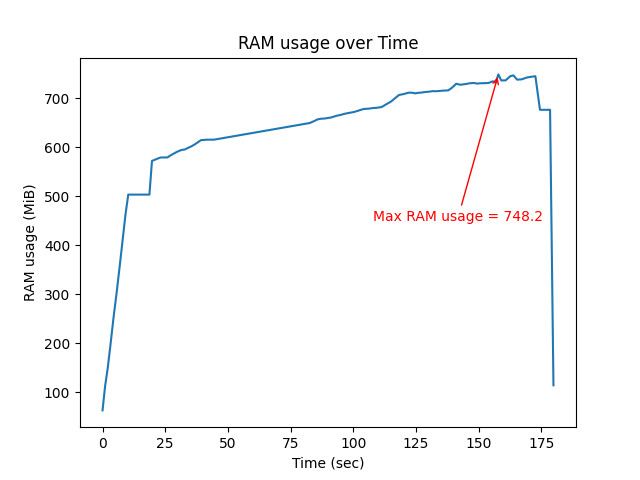
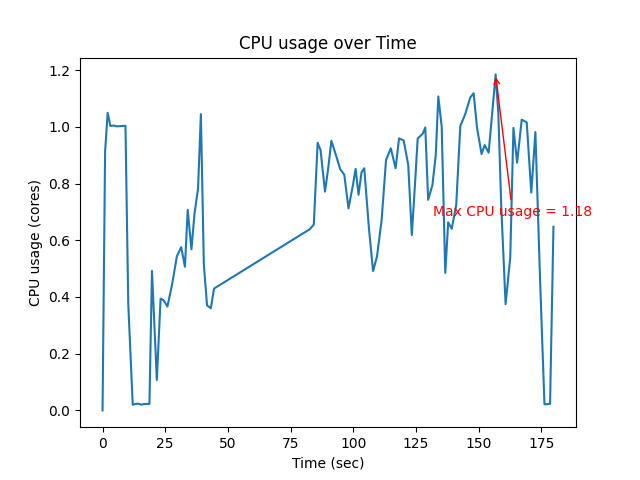
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.1847158472510184 | 0.7029093919121787 | 748.203125 |