Wiki Link

orb-slam2-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-parameters | Camera_height | 192 |
| dataset-parameters | Camera_width | 300 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 146.886 |
| dataset-parameters | cy | 99.35 |
| dataset-parameters | fps | 20.0 |
| dataset-parameters | fx | 183.4616 |
| dataset-parameters | fy | 182.9184 |
| dataset-parameters | image_frequency | 20 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.4 |
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
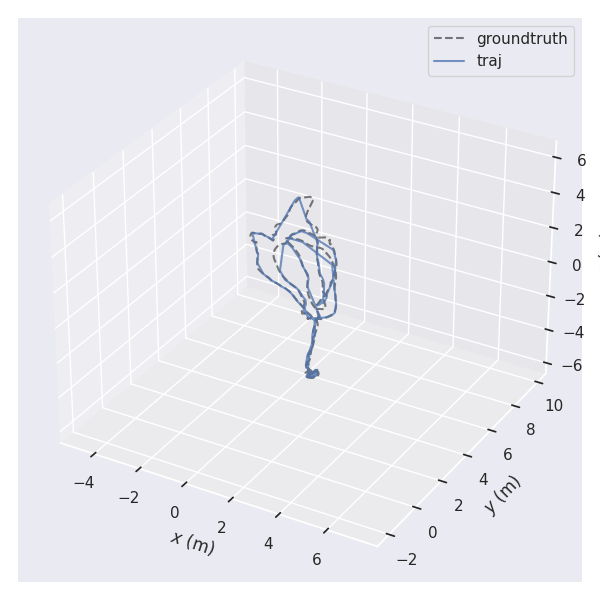
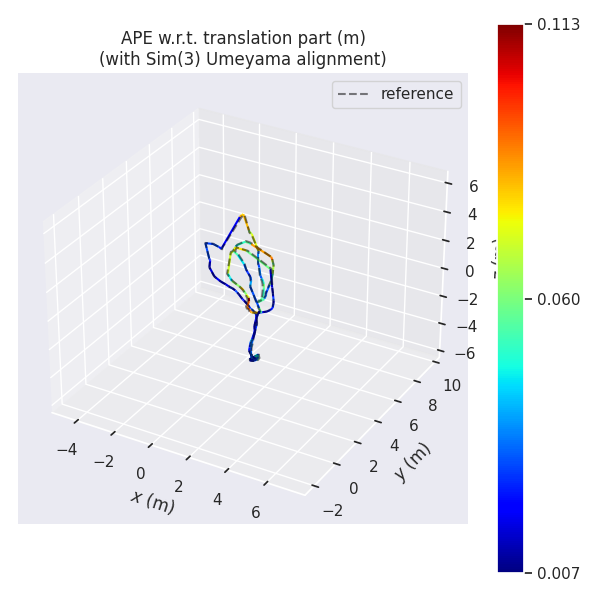
| ATE | 0.04408873431172536 | 0.03771181388856764 | 0.028720110782266807 | 0.022839342951231027 | 0.006794297276489437 | 0.1133569240065731 | 0.32072972137963496 |
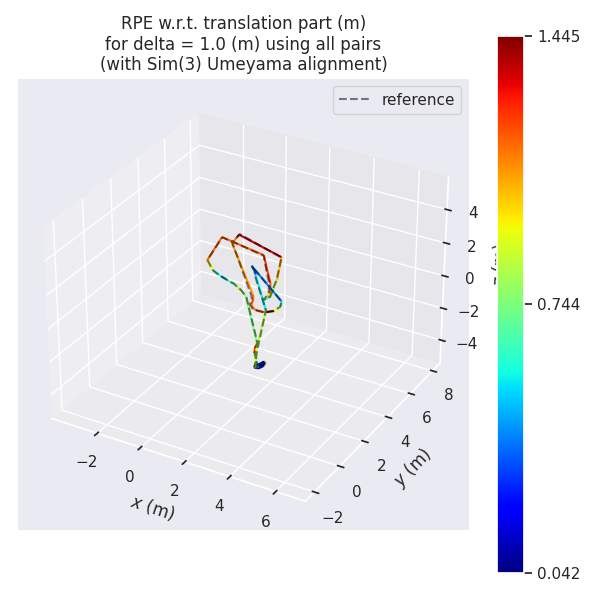
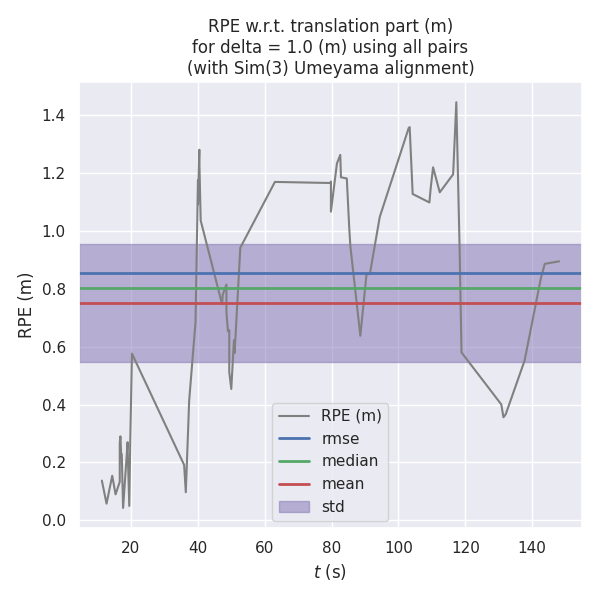
| RPE | 0.8540277794385083 | 0.7505184608951827 | 0.8029110247440367 | 0.40753587315498435 | 0.04242574525033142 | 1.4448489558300555 | 52.5141682597922 |
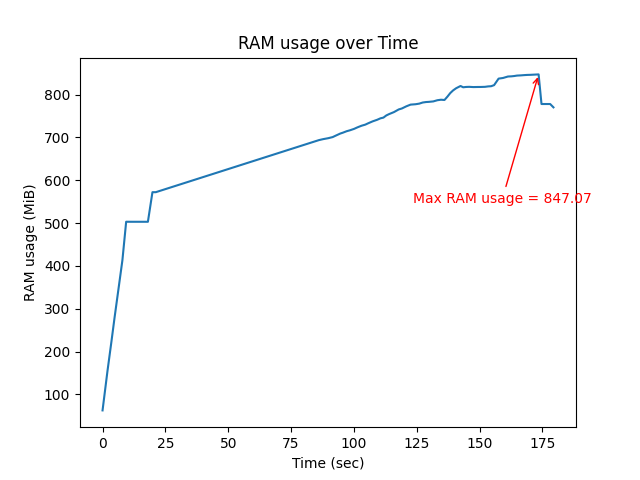
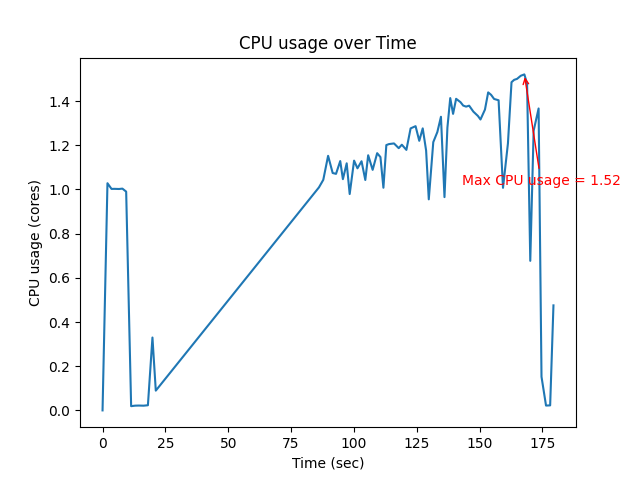
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.5208722188324346 | 1.0442956979040259 | 847.07421875 |