Wiki Link
orb-slam2-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 1 |
| dataset-parameters | Camera_height | 288 |
| dataset-parameters | Camera_width | 451 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 220.329 |
| dataset-parameters | cy | 149.025 |
| dataset-parameters | fps | 20.0 |
| dataset-parameters | fx | 275.1924 |
| dataset-parameters | fy | 274.3776 |
| dataset-parameters | image_frequency | 20 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.6 |
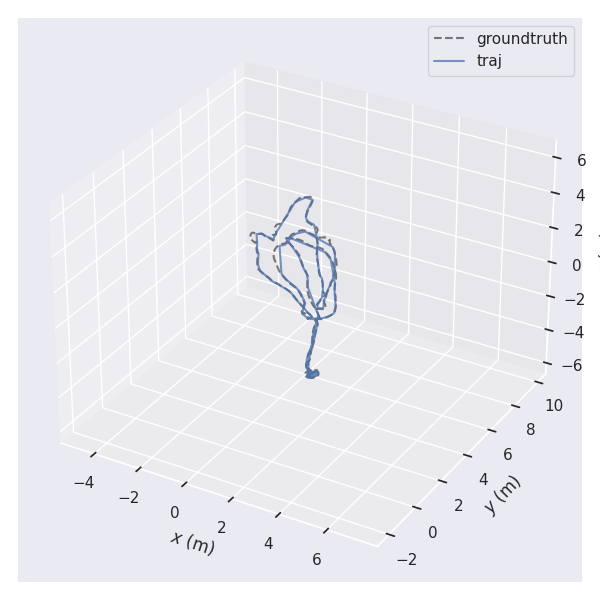
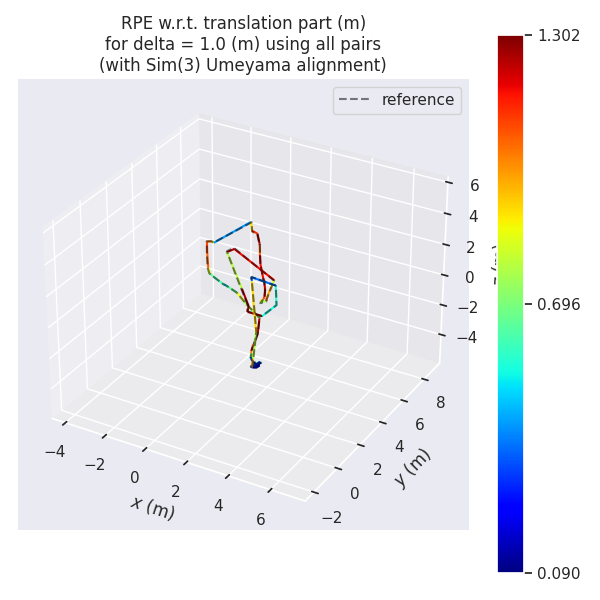
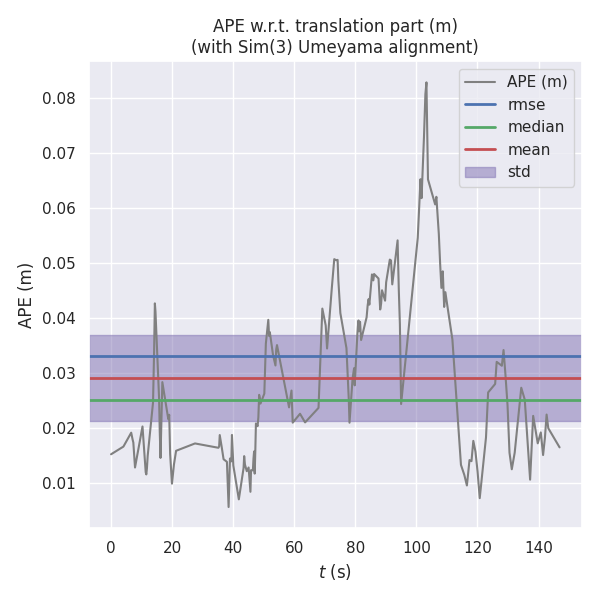
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
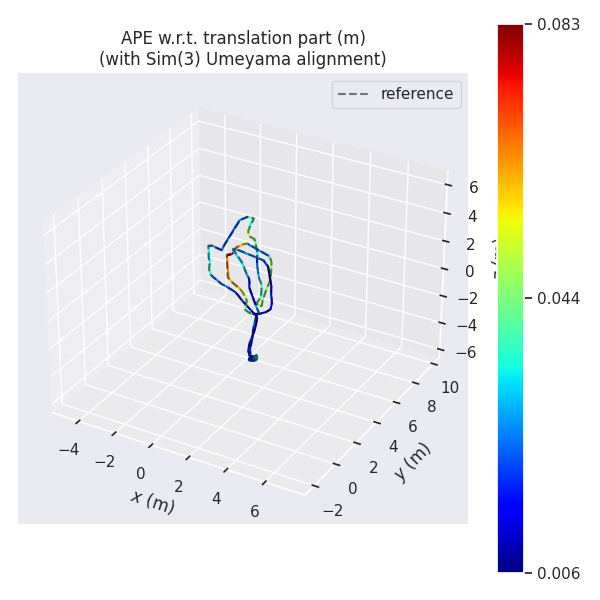
| ATE | 0.03311842597994384 | 0.02918317283394613 | 0.025201509510922364 | 0.015657987186514344 | 0.005686890671960462 | 0.08292603528938608 | 0.18207380313857716 |
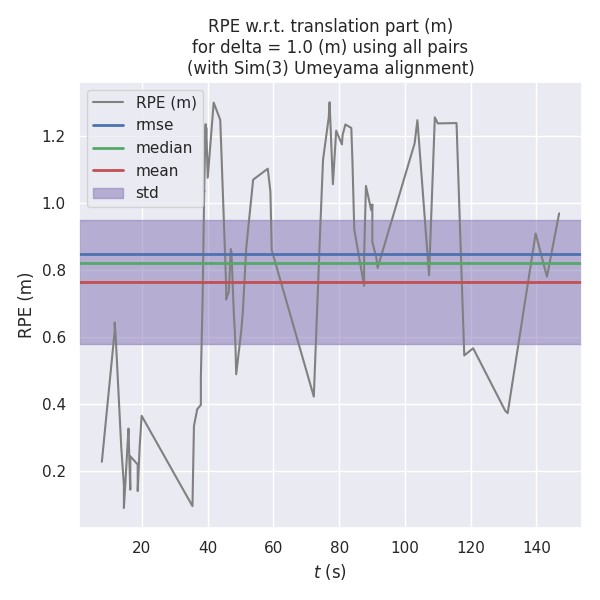
| RPE | 0.8492967729052018 | 0.7638826680207869 | 0.8228326759102313 | 0.3711984347550971 | 0.08977154503298734 | 1.302285726803602 | 60.58962071124395 |
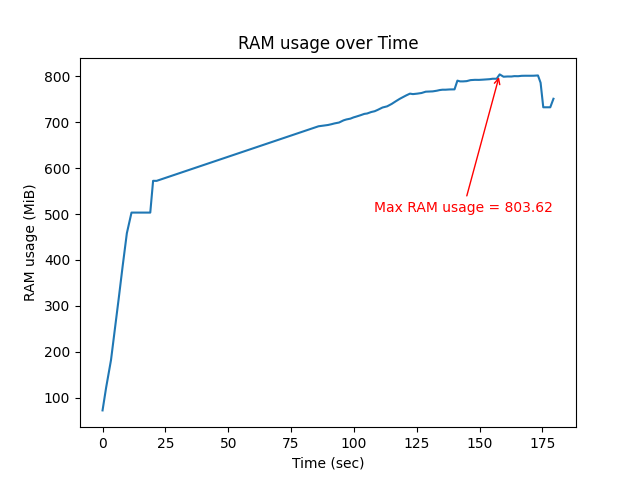
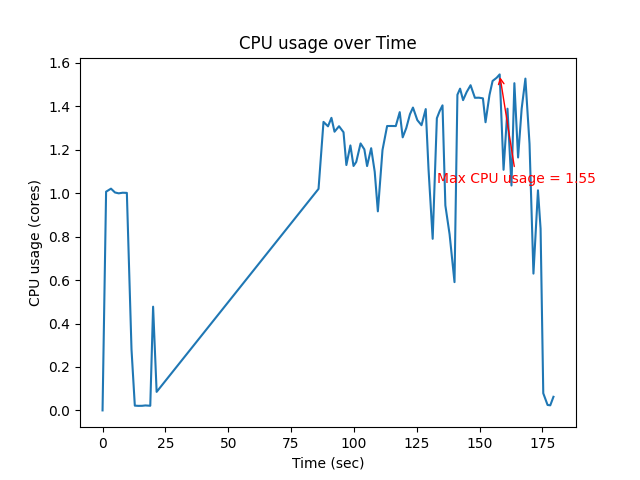
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.546770259046117 | 1.0438184866046831 | 803.625 |