Wiki Link
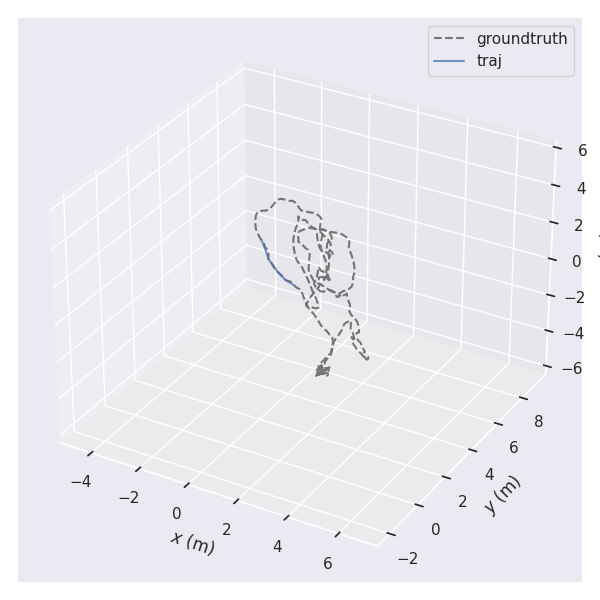
orb-slam2-ros-mono with MH_01_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-frequency | /cam0/image_raw | 20 |
| dataset-parameters | Camera_height | 384 |
| dataset-parameters | Camera_width | 601 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | cx | 293.772 |
| dataset-parameters | cy | 198.7 |
| dataset-parameters | fps | 1.0 |
| dataset-parameters | fx | 366.9232 |
| dataset-parameters | fy | 365.8368 |
| dataset-parameters | image_frequency | 1 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-resolution | /cam0/image_raw | 0.8 |
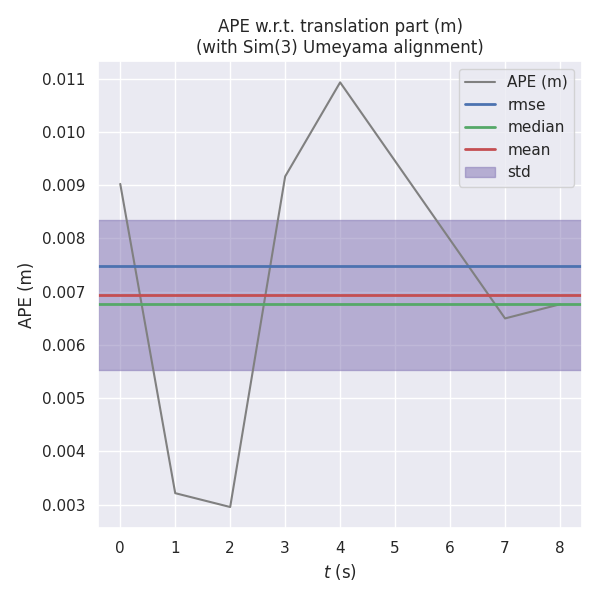
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
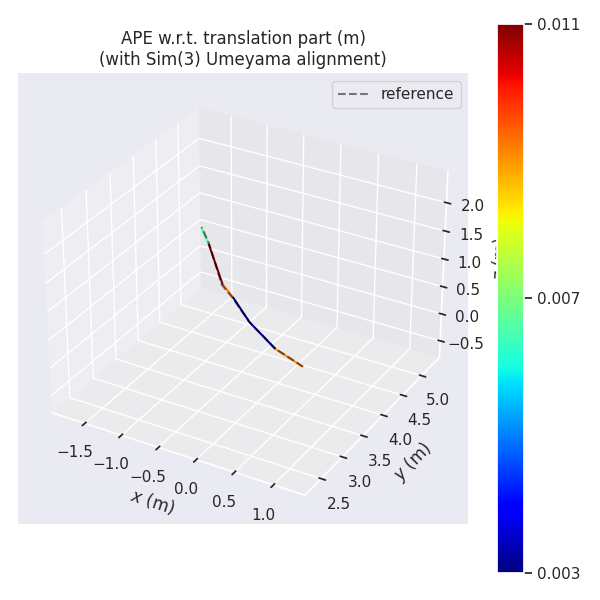
| ATE | 0.007482872817220923 | 0.006935772950073006 | 0.006763055184881108 | 0.0028086365346444136 | 0.002954438242073869 | 0.010932037383712333 | 0.0003919536991909265 |
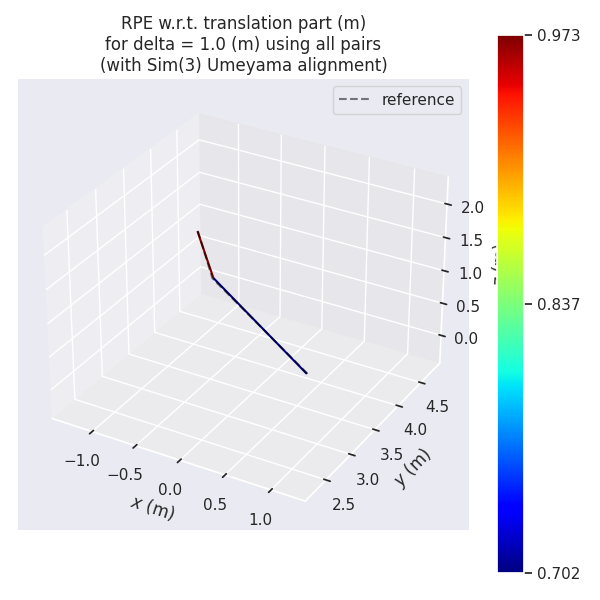
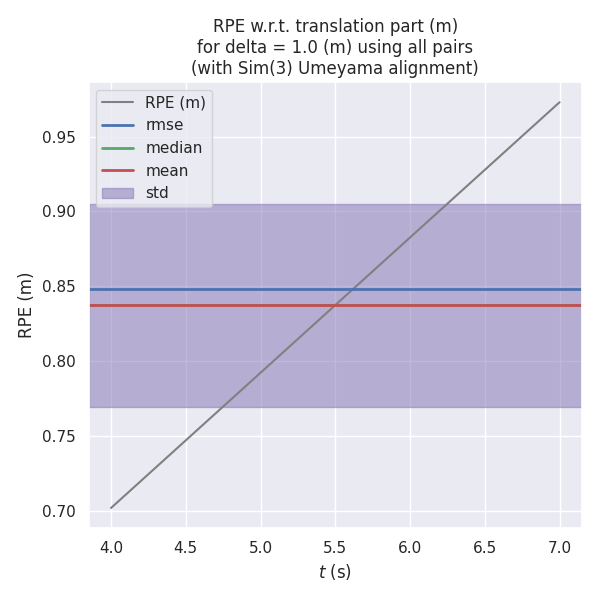
| RPE | 0.8483631173591356 | 0.8374645176106974 | 0.8374645176106974 | 0.1355476323599656 | 0.7019168852507318 | 0.973012149970663 | 1.439439957790621 |
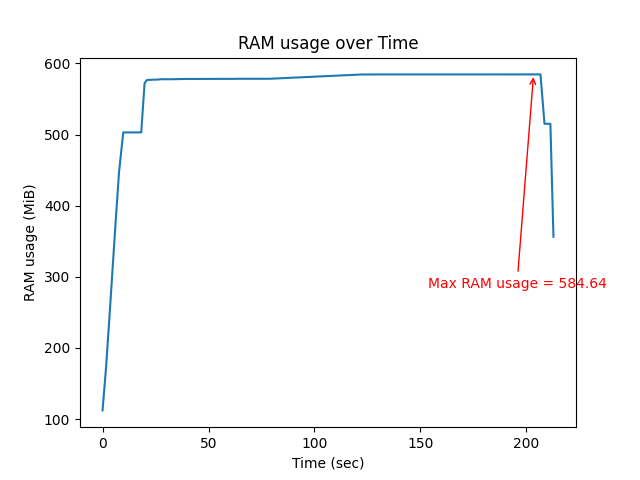
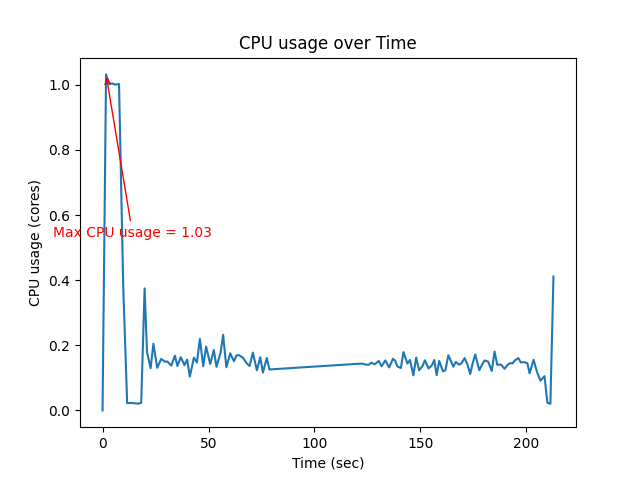
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0320426866034509 | 0.18196710597859186 | 584.63671875 |