Wiki Link


orb-slam3-ros-mono with MH_02_easy
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 2 |
| dataset-parameters | width | 752 |
| dataset-parameters | height | 480 |
| dataset-parameters | newWidth | 600 |
| dataset-parameters | newHeight | 350 |
| dataset-parameters | fx | 458.654 |
| dataset-parameters | fy | 457.296 |
| dataset-parameters | cx | 367.215 |
| dataset-parameters | cy | 248.375 |
| dataset-parameters | k1 | -0.28340811 |
| dataset-parameters | k2 | 0.07395907 |
| dataset-parameters | p1 | 0.00019359 |
| dataset-parameters | p2 | 1.76187114e-05 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | useNewWidth | Camera.newWidth |
| dataset-parameters | useNewHeight | Camera.newHeight |
| algorithm-remap | mono_topic | /camera/image_raw |
| dataset-remap | /camera/image_raw | /cam0/image_raw |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-resolution | /cam0/image_raw | 1.0 |
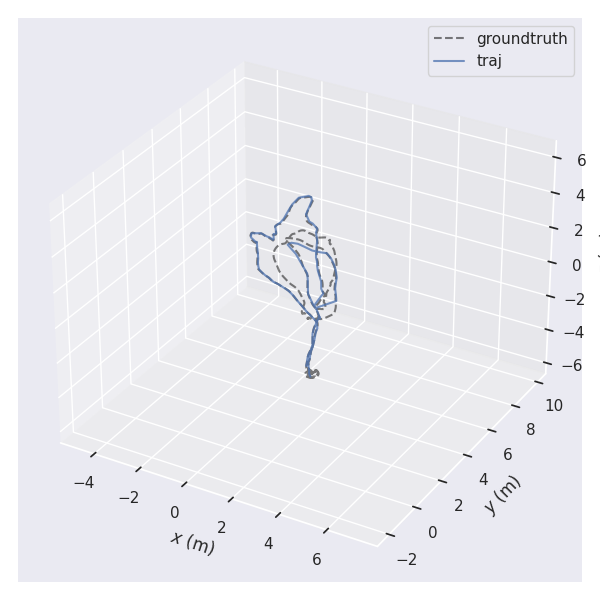
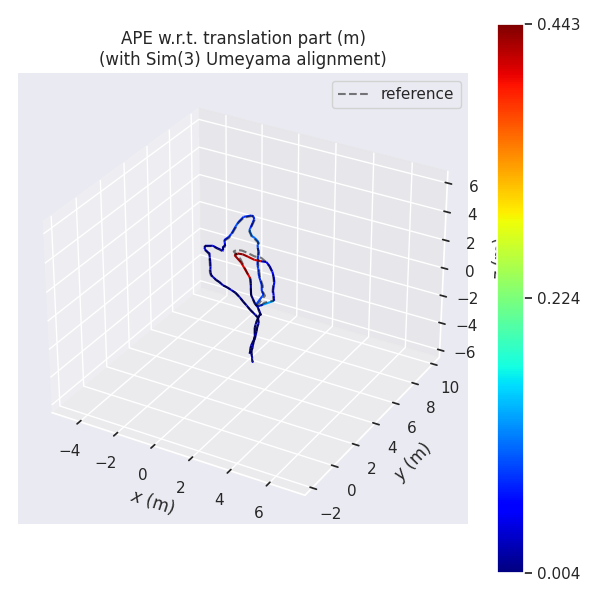
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
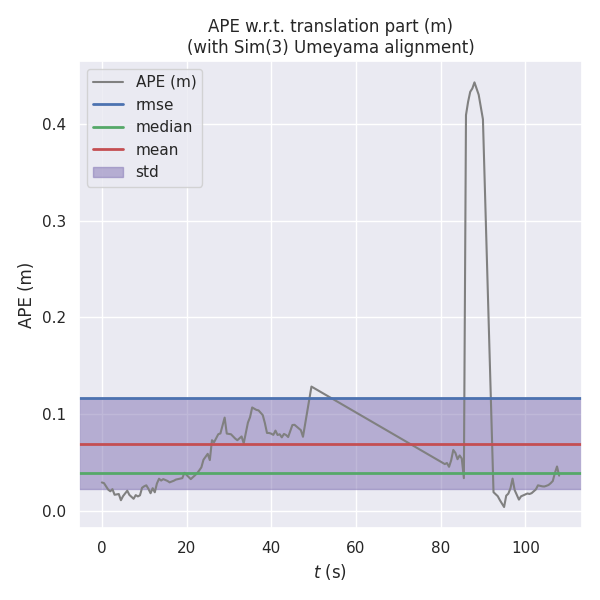
| ATE | 0.1169722943814241 | 0.06916078387325184 | 0.03883187529274623 | 0.09433612047827648 | 0.003806330813102753 | 0.4434093344524713 | 1.6008545653839814 |
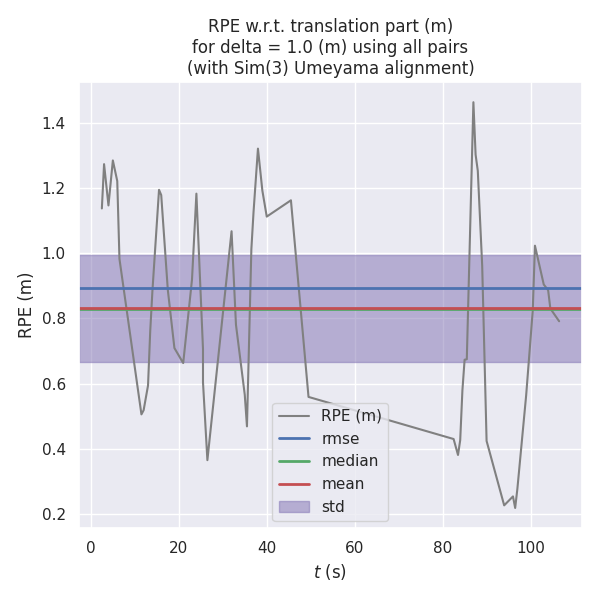
| RPE | 0.8945834810750792 | 0.8307232813071198 | 0.8306522588615939 | 0.3319313701757316 | 0.21752902582843667 | 1.464820101898473 | 44.015378253682364 |
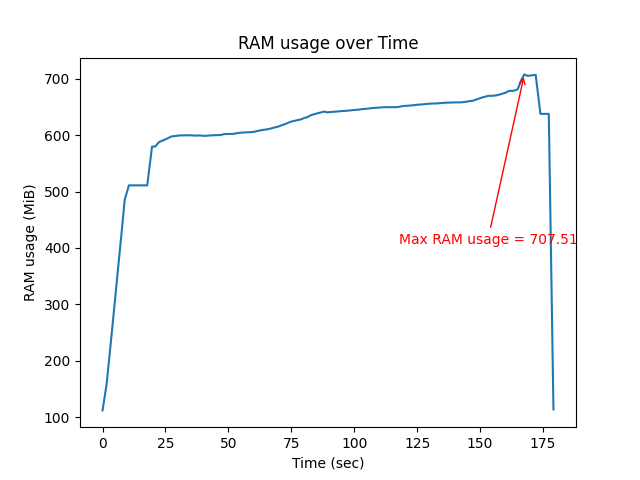
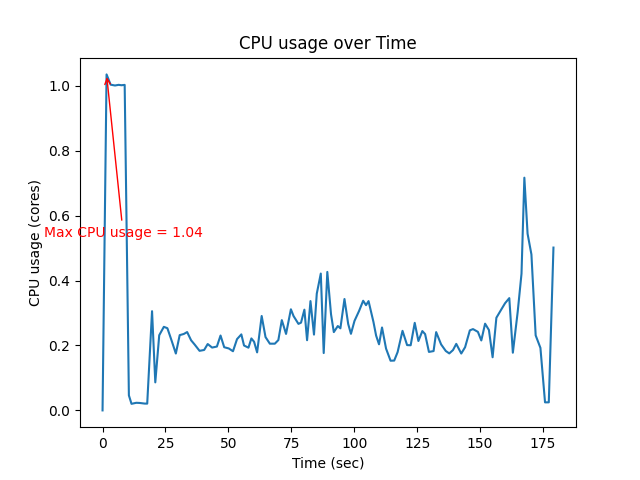
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.0350591370228814 | 0.27336399696421426 | 707.51171875 |