Wiki Link
orb-slam3-ros-stereo-inertial with MH_05_difficult
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | nFeatures | 1000 |
| algorithm-parameters | scaleFactor | 1.2 |
| algorithm-parameters | nLevels | 8 |
| algorithm-parameters | iniThFAST | 20 |
| algorithm-parameters | minThFAST | 7 |
| dataset-parameters | fps | 2 |
| dataset-parameters | width | 601 |
| dataset-parameters | height | 384 |
| dataset-parameters | fx | 349.09731801 |
| dataset-parameters | fy | 349.09731801 |
| dataset-parameters | cx | 291.74860382 |
| dataset-parameters | cy | 205.61695862 |
| dataset-parameters | k1 | 0.0 |
| dataset-parameters | k2 | 0.0 |
| dataset-parameters | p1 | 0.0 |
| dataset-parameters | p2 | 0.0 |
| dataset-parameters | RGB | 1 |
| dataset-parameters | bf | 38.42787944 |
| dataset-parameters | ThDepth | 75.0 |
| dataset-parameters | LEFT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | LEFT_K | [366.9232, 0.0, 293.772, 0.0, 365.8368, 198.7, 0.0, 0.0, 1.0] |
| dataset-parameters | LEFT_R | [0.99996635, -0.00142274, 0.00807958, 0.00136574, 0.99997418, 0.00705563, -0.00808941, -0.00704436, 0.99994247] |
| dataset-parameters | LEFT_P | [349.09731801, 0, 291.74860382, 0, 0, 349.09731801, 205.61695862, 0, 0, 0, 1, 0] |
| dataset-parameters | bFishEye | 0 |
| dataset-parameters | RIGHT_D | [-0.28340811, 0.07395907, 0.00019359, 1.76187114e-05, 0.0] |
| dataset-parameters | RIGHT_K | [366.0696, 0.0, 303.9992, 0.0, 364.9072, 204.1904, 0.0, 0.0, 1.0] |
| dataset-parameters | RIGHT_R | [0.99996335, -0.00362581, 0.00775544, 0.0036804, 0.99996848, -0.00703585, -0.00772969, 0.00706413, 0.99994517] |
| dataset-parameters | RIGHT_P | [349.09731801, 0, 291.74860382, -38.42787944, 0, 349.09731801, 205.61695862, 0, 0, 0, 1, 0] |
| dataset-parameters | NoiseGyro | 0.00017 |
| dataset-parameters | NoiseAcc | 0.002 |
| dataset-parameters | GyroWalk | 1.9393e-05 |
| dataset-parameters | AccWalk | 0.003 |
| dataset-parameters | T_b_c1 | [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975, 0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768, -0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949, 0.0, 0.0, 0.0, 1.0] |
| dataset-parameters | Frequency | 200 |
| algorithm-remap | stereo_left | /camera/left/image_raw |
| algorithm-remap | stereo_right | /camera/right/image_raw |
| algorithm-remap | imu_topic | /imu |
| dataset-remap | /camera/left/image_raw | /cam0/image_raw |
| dataset-remap | /camera/right/image_raw | /cam1/image_raw |
| dataset-remap | /imu | /imu0 |
| dataset-frequency | /cam0/image_raw | 10 |
| dataset-frequency | /imu0 | 1 |
| dataset-frequency | /cam1/image_raw | 10 |
| dataset-resolution | /cam0/image_raw | 0.8 |
| dataset-resolution | /cam1/image_raw | 0.8 |
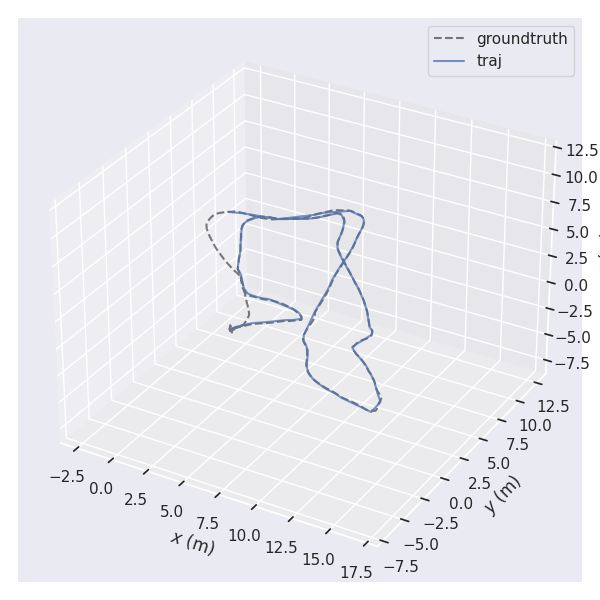
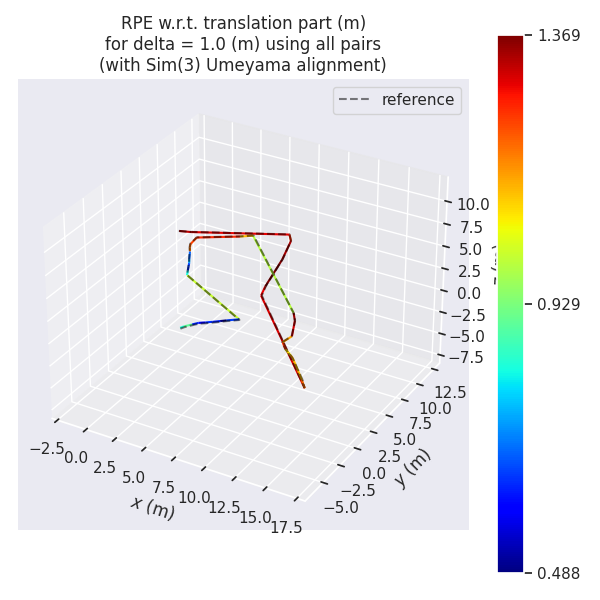
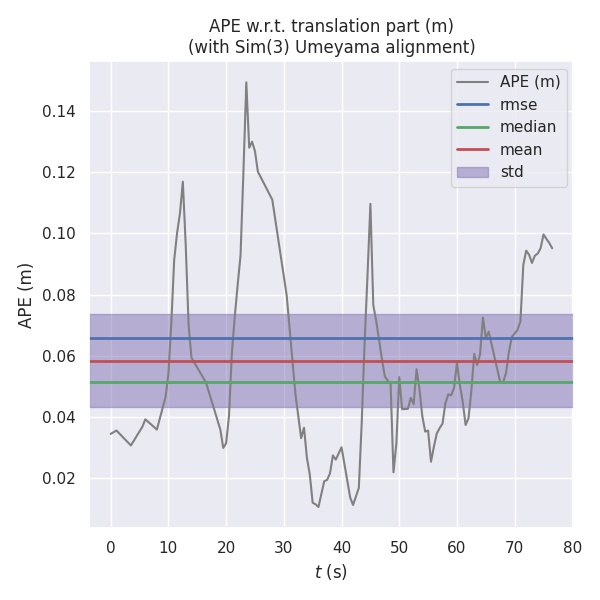
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
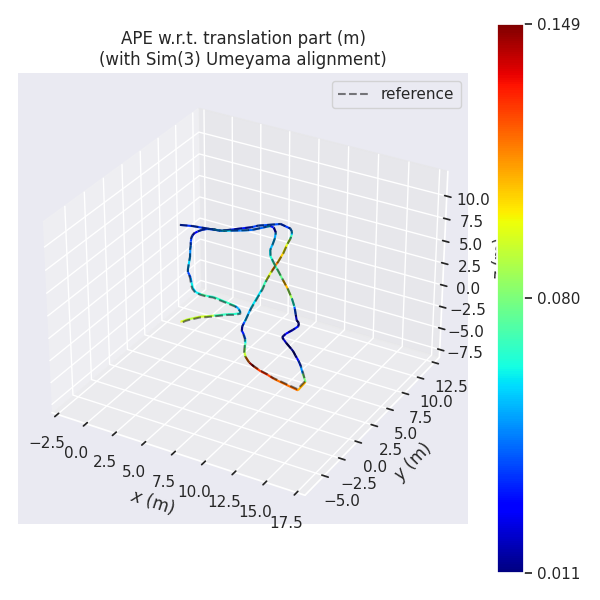
| ATE | 0.06590658415061355 | 0.05843758697579397 | 0.05135999763517069 | 0.030475010465107644 | 0.010612911016448031 | 0.1492807698344966 | 0.4951792731218173 |
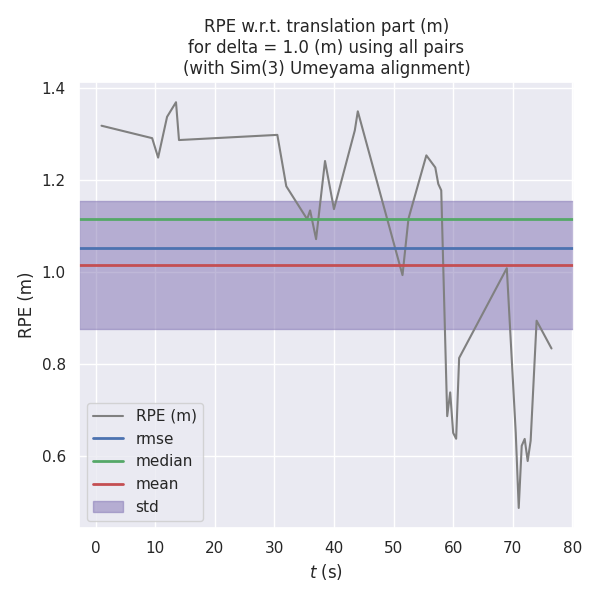
| RPE | 1.0527057542062566 | 1.0157605102769505 | 1.1163561388861152 | 0.2764416587652324 | 0.48822701176502586 | 1.3693033397269943 | 38.78662917286373 |
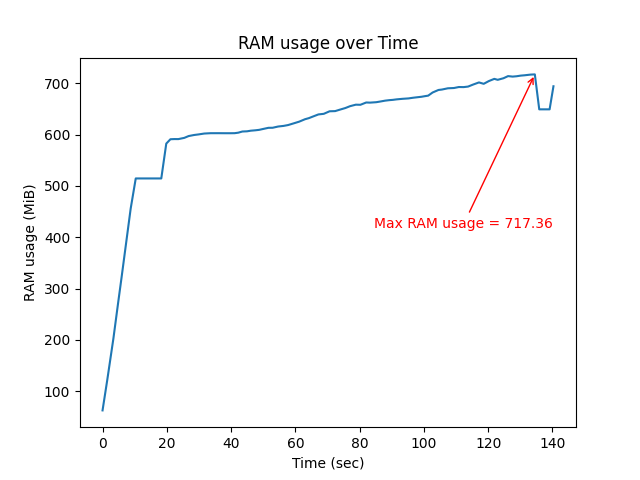
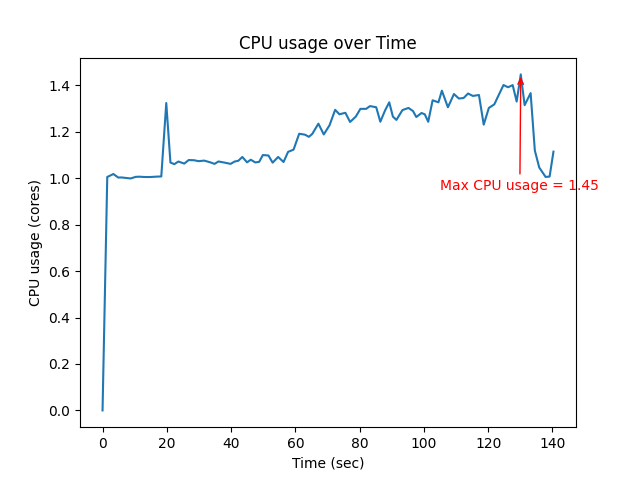
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 1.4476243673259528 | 1.1729818799352663 | 717.359375 |