Wiki Link
ndt-loam with kitti_2011_09_30_drive_0028_synced_full
| Parameter type | Parameter name | Parameter value |
|---|---|---|
| algorithm-parameters | distance_near_thresh | 0.5 |
| algorithm-parameters | distance_far_thresh | 100.0 |
| algorithm-parameters | downsample_resolution | 0.1 |
| algorithm-parameters | statistical_mean_k | 30 |
| algorithm-parameters | statistical_stddev | 1.2 |
| algorithm-parameters | radius_radius | 0.5 |
| algorithm-parameters | radius_min_neighbors | 5 |
| algorithm-parameters | keyframe_delta_trans | 10.0 |
| algorithm-parameters | keyframe_delta_angle | 0.17 |
| algorithm-parameters | keyframe_delta_time | 1.0 |
| algorithm-parameters | scan_line | 64 |
| algorithm-parameters | mapping_skip_frame | 1 |
| algorithm-parameters | minimum_range | 5 |
| algorithm-parameters | mapping_line_resolution | 0.4 |
| algorithm-parameters | mapping_plane_resolution | 0.8 |
| algorithm-parameters | seq | 4 |
| algorithm-parameters | g2o_solver_num_iterations | 1024 |
| algorithm-parameters | distance_thresh | 20.0 |
| algorithm-parameters | accum_distance_thresh | 100.0 |
| algorithm-parameters | min_edge_interval | 50.0 |
| algorithm-parameters | fitness_score_thresh | 2.0 |
| algorithm-parameters | ndt_resolution | 1.0 |
| algorithm-parameters | ndt_num_threads | 8 |
| algorithm-parameters | gps_edge_robust_kernel_size | 1.0 |
| algorithm-parameters | gps_edge_stddev_xy | 20.0 |
| algorithm-parameters | gps_edge_stddev_z | 5.0 |
| algorithm-parameters | imu_orientation_edge_stddev | 1.0 |
| algorithm-parameters | imu_acceleration_edge_stddev | 1.0 |
| algorithm-parameters | floor_edge_stddev | 100.0 |
| algorithm-parameters | odometry_edge_robust_kernel_size | 1.0 |
| algorithm-parameters | loop_closure_edge_robust_kernel_size | 1.0 |
| algorithm-parameters | const_stddev_x | 0.5 |
| algorithm-parameters | const_stddev_q | 0.1 |
| algorithm-parameters | var_gain_a | 20.0 |
| algorithm-parameters | min_stddev_x | 0.1 |
| algorithm-parameters | max_stddev_x | 5.0 |
| algorithm-parameters | min_stddev_q | 0.05 |
| algorithm-parameters | max_stddev_q | 0.2 |
| algorithm-parameters | graph_update_interval | 10.0 |
| algorithm-parameters | max_keyframes_per_update | 20 |
| algorithm-parameters | map_cloud_update_interval | 10.0 |
| algorithm-parameters | map_cloud_resolution | 0.5 |
| algorithm-parameters | pointcloud_topic | /points_raw |
| algorithm-parameters | enable_floor_detection | False |
| algorithm-parameters | enable_gps | False |
| algorithm-parameters | enable_imu_acc | False |
| algorithm-parameters | enable_imu_ori | False |
| algorithm-parameters | base_link_frame | base_link |
| algorithm-parameters | use_distance_filter | True |
| algorithm-parameters | downsample_method | VOXELGRID |
| algorithm-parameters | outlier_removal_method | RADIUS |
| algorithm-parameters | use_angle_calibration | False |
| algorithm-parameters | odom_frame_id | odom |
| algorithm-parameters | calib_file | home/chenshoubin/slam_ws/src/lv_slam/config/kitti_calib/calib04-12.txt |
| algorithm-parameters | lfa_output_path | /home/chenshoubin/slam_ws/src/lv_slam/data/kitti_lv_dlo_lfa_ggo |
| algorithm-parameters | g2o_solver_type | lm_var_cholmod |
| algorithm-parameters | registration_method | NDT_OMP |
| algorithm-parameters | ndt_nn_search_method | DIRECT7 |
| algorithm-parameters | gps_edge_robust_kernel | Huber |
| algorithm-parameters | imu_orientation_edge_robust_kernel | Huber |
| algorithm-parameters | imu_acceleration_edge_robust_kernel | Huber |
| algorithm-parameters | floor_edge_robust_kernel | Huber |
| algorithm-parameters | odometry_edge_robust_kernel | Huber |
| algorithm-parameters | loop_closure_edge_robust_kernel | Huber |
| algorithm-parameters | use_const_inf_matrix | True |
| dataset-parameters | lidar_frequency | 10 |
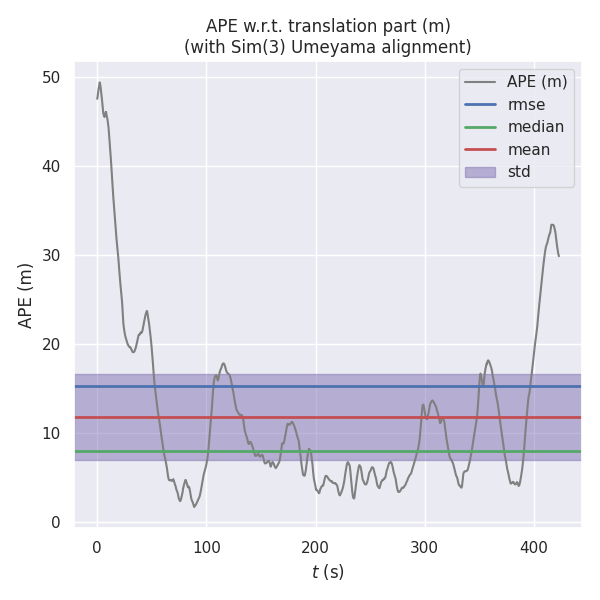
| RMSE | Mean | Median | Std | Min | Max | SSE | |
|---|---|---|---|---|---|---|---|
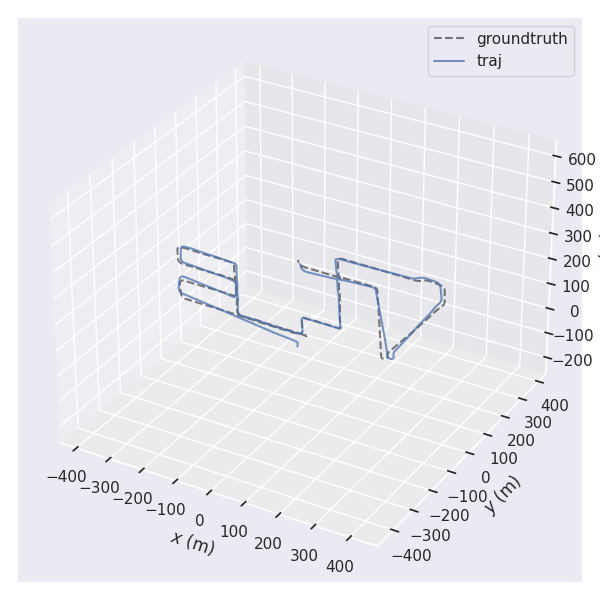
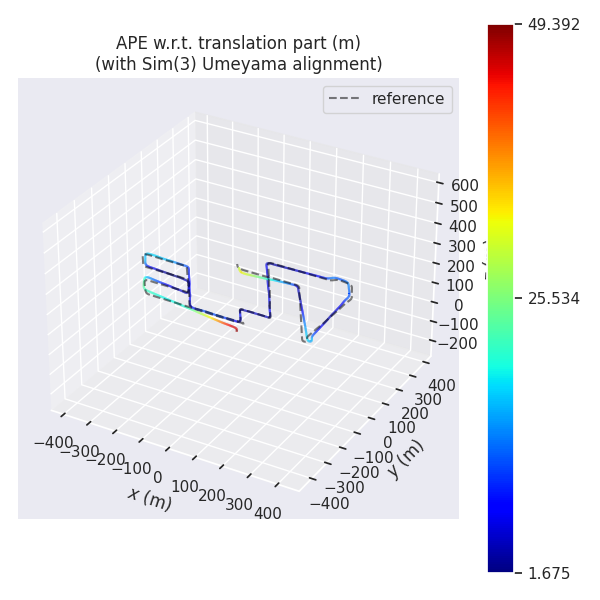
| ATE | 15.273754578188468 | 11.776015731804568 | 7.9558360293652255 | 9.726923069451331 | 1.6753551044396324 | 49.39169752335427 | 937349.4920793979 |
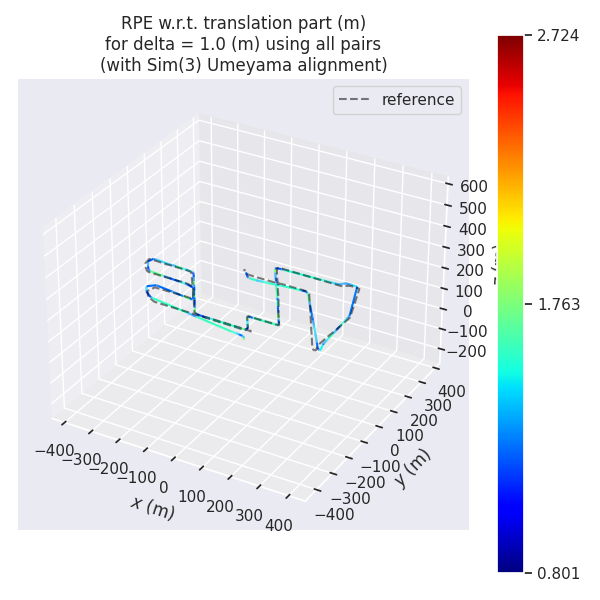
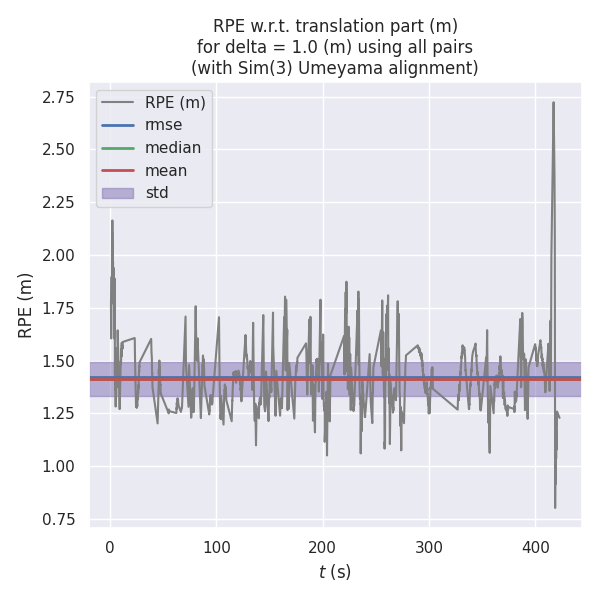
| RPE | 1.4233157913716854 | 1.414220240576122 | 1.412117027887066 | 0.16065165144754207 | 0.8014631374655535 | 2.723848003906073 | 3395.2874631383806 |
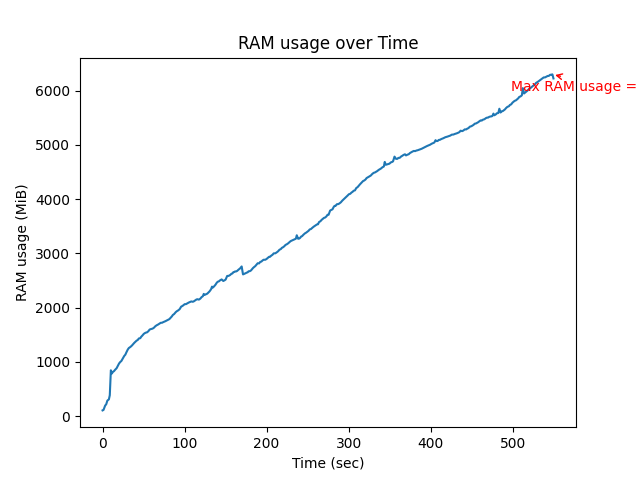
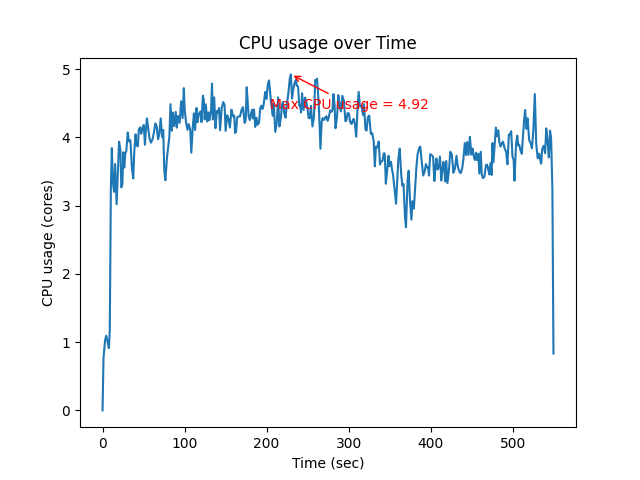
| Max CPU (core) | Mean CPU (core) | Max Memory (MB) |
|---|---|---|
| 4.92388105025101 | 3.9517292582843138 | 6296.75390625 |